10.6 Torque – University Physics Volume 1 - UCF Pressbooks
Maybe your like
Defining Torque
So far we have defined many variables that are rotational equivalents to their translational counterparts. Let’s consider what the counterpart to force must be. Since forces change the translational motion of objects, the rotational counterpart must be related to changing the rotational motion of an object about an axis. We call this rotational counterpart torque.
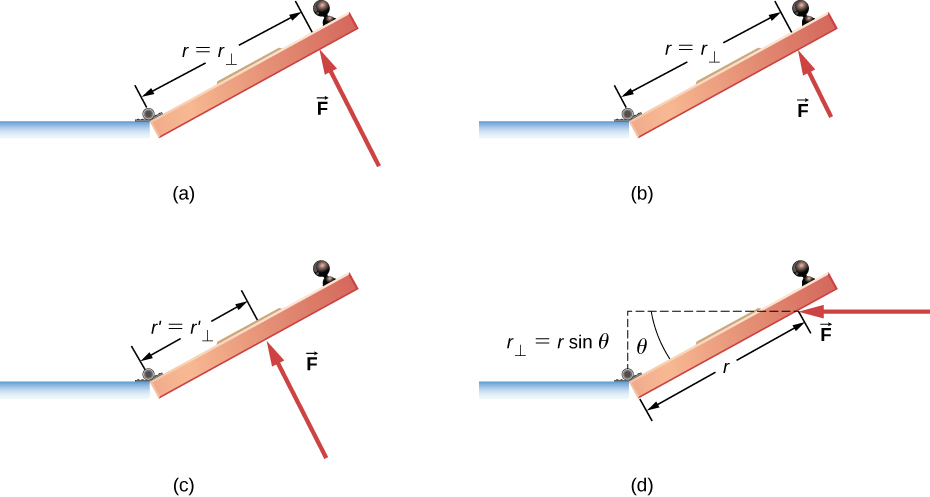
In everyday life, we rotate objects about an axis all the time, so intuitively we already know much about torque. Consider, for example, how we rotate a door to open it. First, we know that a door opens slowly if we push too close to its hinges; it is more efficient to rotate a door open if we push far from the hinges. Second, we know that we should push perpendicular to the plane of the door; if we push parallel to the plane of the door, we are not able to rotate it. Third, the larger the force, the more effective it is in opening the door; the harder you push, the more rapidly the door opens. The first point implies that the farther the force is applied from the axis of rotation, the greater the angular acceleration; the second implies that the effectiveness depends on the angle at which the force is applied; the third implies that the magnitude of the force must also be part of the equation. Note that for rotation in a plane, torque has two possible directions. Torque is either clockwise or counterclockwise relative to the chosen pivot point. Figure shows counterclockwise rotations.
Now let’s consider how to define torques in the general three-dimensional case.
Torque
When a force [latex]\mathbf{\overset{\to }{F}}[/latex] is applied to a point P whose position is [latex]\mathbf{\overset{\to }{r}}[/latex] relative to O (Figure), the torque [latex]\mathbf{\overset{\to }{\tau }}[/latex] around O is
[latex]\mathbf{\overset{\to }{\tau }}=\mathbf{\overset{\to }{r}}\times \mathbf{\overset{\to }{F}}.[/latex]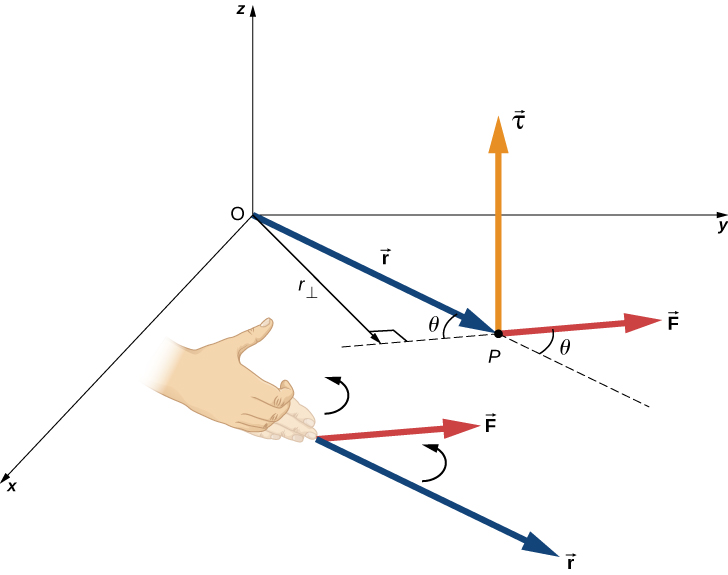
From the definition of the cross product, the torque [latex]\mathbf{\overset{\to }{\tau }}[/latex] is perpendicular to the plane containing [latex]\mathbf{\overset{\to }{r}}\,\text{and}\,\mathbf{\overset{\to }{F}}[/latex] and has magnitude
[latex]|\mathbf{\overset{\to }{\tau }}|=|\mathbf{\overset{\to }{r}}\times \mathbf{\overset{\to }{F}}|=rF\text{sin}\,\theta ,[/latex]where [latex]\theta[/latex] is the angle between the vectors [latex]\mathbf{\overset{\to }{r}}[/latex] and [latex]\mathbf{\overset{\to }{F}}[/latex]. The SI unit of torque is newtons times meters, usually written as [latex]\text{N}\cdot \text{m}[/latex]. The quantity [latex]{r}_{\perp }=r\text{sin}\,\theta[/latex] is the perpendicular distance from O to the line determined by the vector [latex]\mathbf{\overset{\to }{F}}[/latex] and is called the lever arm. Note that the greater the lever arm, the greater the magnitude of the torque. In terms of the lever arm, the magnitude of the torque is
[latex]|\mathbf{\overset{\to }{\tau }}|={r}_{\perp }F.[/latex]The cross product [latex]\mathbf{\overset{\to }{r}}\times \mathbf{\overset{\to }{F}}[/latex] also tells us the sign of the torque. In Figure, the cross product [latex]\mathbf{\overset{\to }{r}}\times \mathbf{\overset{\to }{F}}[/latex] is along the positive z-axis, which by convention is a positive torque. If [latex]\mathbf{\overset{\to }{r}}\times \mathbf{\overset{\to }{F}}[/latex] is along the negative z-axis, this produces a negative torque.
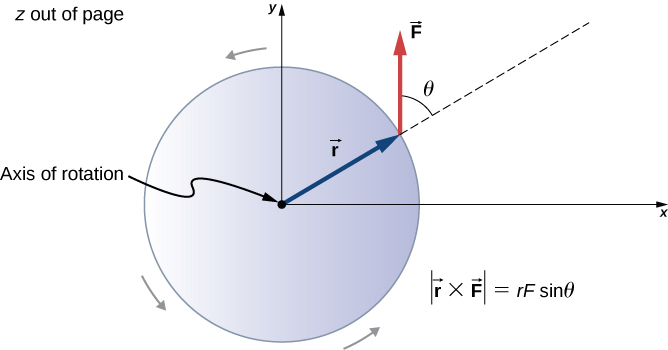
If we consider a disk that is free to rotate about an axis through the center, as shown in Figure, we can see how the angle between the radius [latex]\mathbf{\overset{\to }{r}}[/latex] and the force [latex]\mathbf{\overset{\to }{F}}[/latex] affects the magnitude of the torque. If the angle is zero, the torque is zero; if the angle is [latex]90^\circ[/latex], the torque is maximum. The torque in Figure is positive because the direction of the torque by the right-hand rule is out of the page along the positive z-axis. The disk rotates counterclockwise due to the torque, in the same direction as a positive angular acceleration.
Any number of torques can be calculated about a given axis. The individual torques add to produce a net torque about the axis. When the appropriate sign (positive or negative) is assigned to the magnitudes of individual torques about a specified axis, the net torque about the axis is the sum of the individual torques:
[latex]{\mathbf{\overset{\to }{\tau }}}_{\text{net}}=\sum _{i}|{\mathbf{\overset{\to }{\tau }}}_{i}|.[/latex]Tag » How To Find Net Torque
-
10.7: Torque - Physics LibreTexts
-
How To Calculate The Net Torque On An Object From Multiple Forces
-
10.6 Torque | University Physics Volume 1 - Lumen Learning
-
How To Calculate The Net Torque - Sciencing
-
Physics, Net Torque (5 Of 13) Five Forces Applied To A Door - YouTube
-
Ch 15 Torque Fundamentals (10 Of 13) How To Calculate ... - YouTube
-
Net Torque & Sign Of Torque - YouTube
-
Torque And Rotational Motion Tutorial - Guelph Physics
-
Torque Calculator
-
How To Find Net Torque? [closed] - Math Stack Exchange
-
Solving Net Torque Problems
-
Torque (article) | Khan Academy
-
Finding Torque For Angled Forces (video) - Khan Academy