4.1 Displacement And Velocity Vectors | University Physics Volume 1
Maybe your like
Displacement Vector
To describe motion in two and three dimensions, we must first establish a coordinate system and a convention for the axes. We generally use the coordinates x, y, and z to locate a particle at point P(x, y, z) in three dimensions. If the particle is moving, the variables x, y, and z are functions of time (t):
$$x=x(t)\quad y=y(t)\quad z=z(t).$$The position vector from the origin of the coordinate system to point P is $$ \overset{\to }{r}(t). $$ In unit vector notation, introduced in Coordinate Systems and Components of a Vector, $$ \overset{\to }{r}(t) $$ is
$$\overset{\to }{r}(t)=x(t)\hat{i}+y(t)\hat{j}+z(t)\hat{k}.$$(Figure) shows the coordinate system and the vector to point P, where a particle could be located at a particular time t. Note the orientation of the x, y, and z axes. This orientation is called a right-handed coordinate system (Coordinate Systems and Components of a Vector) and it is used throughout the chapter.
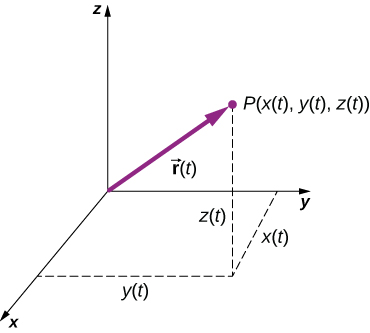
Figure 4.2 A three-dimensional coordinate system with a particle at position P(x(t), y(t), z(t)).
With our definition of the position of a particle in three-dimensional space, we can formulate the three-dimensional displacement. (Figure) shows a particle at time $$ {t}_{1} $$ located at $$ {P}_{1} $$ with position vector $$ \overset{\to }{r}({t}_{1}). $$ At a later time $$ {t}_{2}, $$ the particle is located at $$ {P}_{2} $$ with position vector $$ \overset{\to }{r}({t}_{2})$$. The displacement vector $$ \text{Δ}\overset{\to }{r} $$ is found by subtracting $$ \overset{\to }{r}({t}_{1}) $$ from $$ \overset{\to }{r}({t}_{2})\text{ }:$$
$$\text{Δ}\overset{\to }{r}=\overset{\to }{r}({t}_{2})-\overset{\to }{r}({t}_{1}).$$Vector addition is discussed in Vectors. Note that this is the same operation we did in one dimension, but now the vectors are in three-dimensional space.
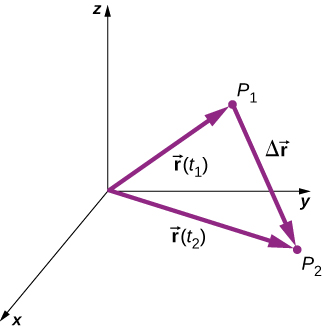
Figure 4.3 The displacement $$ \text{Δ}\overset{\to }{r}=\overset{\to }{r}({t}_{2})-\overset{\to }{r}({t}_{1}) $$ is the vector from $$ {P}_{1} $$ to $$ {P}_{2}$$.
The following examples illustrate the concept of displacement in multiple dimensions.
Example
Polar Orbiting Satellite
A satellite is in a circular polar orbit around Earth at an altitude of 400 km—meaning, it passes directly overhead at the North and South Poles. What is the magnitude and direction of the displacement vector from when it is directly over the North Pole to when it is at $$ -45\text{°} $$ latitude?
Strategy
We make a picture of the problem to visualize the solution graphically. This will aid in our understanding of the displacement. We then use unit vectors to solve for the displacement.
Solution
Show Answer (Figure) shows the surface of Earth and a circle that represents the orbit of the satellite. Although satellites are moving in three-dimensional space, they follow trajectories of ellipses, which can be graphed in two dimensions. The position vectors are drawn from the center of Earth, which we take to be the origin of the coordinate system, with the y-axis as north and the x-axis as east. The vector between them is the displacement of the satellite. We take the radius of Earth as 6370 km, so the length of each position vector is 6770 km.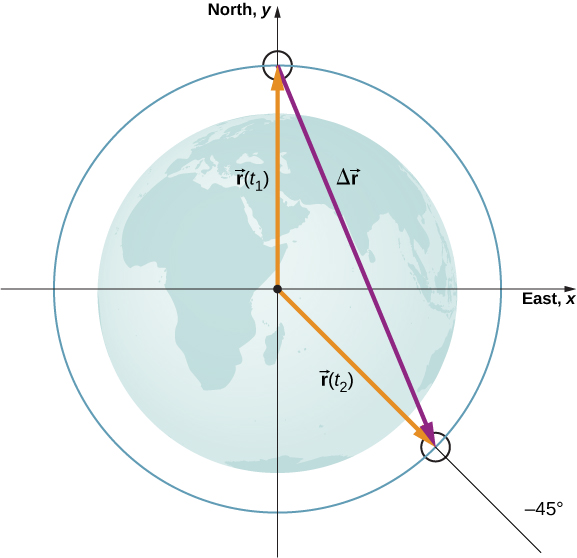
Figure 4.4 Two position vectors are drawn from the center of Earth, which is the origin of the coordinate system, with the y-axis as north and the x-axis as east. The vector between them is the displacement of the satellite.
In unit vector notation, the position vectors are
$$\begin{array}{cc} \overset{\to }{r}({t}_{1})=6770.\,\text{km}\hat{j}\hfill \\ \overset{\to }{r}({t}_{2})=6770.\,\text{km}\,(\text{cos}\,45\text{°})\hat{i}+6770.\,\text{km}\,(\text{sin}(-45\text{°}))\hat{j}.\end{array}$$Evaluating the sine and cosine, we have
$$\begin{array}{cc} \hfill \overset{\to }{r}({t}_{1})& =\hfill & 6770.\hat{j}\hfill \\ \hfill \overset{\to }{r}({t}_{2})& =\hfill & 4787\hat{i}-4787\hat{j}.\hfill \end{array}$$Now we can find $$ \text{Δ}\overset{\to }{r}$$, the displacement of the satellite:
$$\text{Δ}\overset{\to }{r}=\overset{\to }{r}({t}_{2})-\overset{\to }{r}({t}_{1})=4787\hat{i}-11,557\hat{j}.$$The magnitude of the displacement is $$ |\text{Δ}\overset{\to }{r}|=\sqrt{{(4787)}^{2}+{(-11,557)}^{2}}=12,509\,\text{km}. $$ The angle the displacement makes with the x-axis is $$ \theta ={\text{tan}}^{-1}(\frac{-11,557}{4787})=-67.5\text{°}.$$
Significance
Plotting the displacement gives information and meaning to the unit vector solution to the problem. When plotting the displacement, we need to include its components as well as its magnitude and the angle it makes with a chosen axis—in this case, the x-axis ((Figure)).
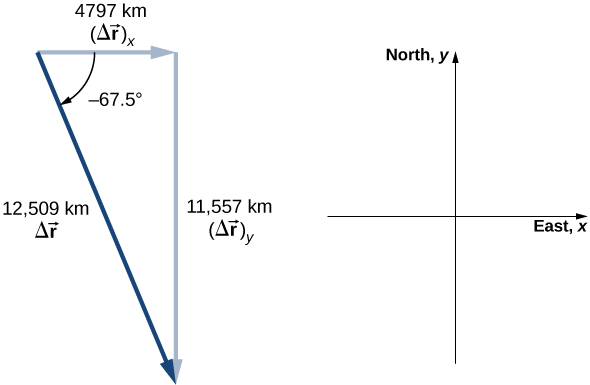
Figure 4.5 Displacement vector with components, angle, and magnitude.
Note that the satellite took a curved path along its circular orbit to get from its initial position to its final position in this example. It also could have traveled 4787 km east, then 11,557 km south to arrive at the same location. Both of these paths are longer than the length of the displacement vector. In fact, the displacement vector gives the shortest path between two points in one, two, or three dimensions.
Many applications in physics can have a series of displacements, as discussed in the previous chapter. The total displacement is the sum of the individual displacements, only this time, we need to be careful, because we are adding vectors. We illustrate this concept with an example of Brownian motion.
Example
Brownian Motion
Brownian motion is a chaotic random motion of particles suspended in a fluid, resulting from collisions with the molecules of the fluid. This motion is three-dimensional. The displacements in numerical order of a particle undergoing Brownian motion could look like the following, in micrometers ((Figure)):
$$\begin{array}{cc} \hfill \text{Δ}{\overset{\to }{r}}_{1}& =\hfill & 2.0\hat{i}+\hat{j}+3.0\hat{k}\hfill \\ \hfill \text{Δ}{\overset{\to }{r}}_{2}& =\hfill & \text{−}\hat{i}+3.0\hat{k}\hfill \\ \hfill \text{Δ}{\overset{\to }{r}}_{3}& =\hfill & 4.0\hat{i}-2.0\hat{j}+\hat{k}\hfill \\ \hfill \text{Δ}{\overset{\to }{r}}_{4}& =\hfill & -3.0\hat{i}+\hat{j}+2.0\hat{k}.\hfill \end{array}$$What is the total displacement of the particle from the origin?
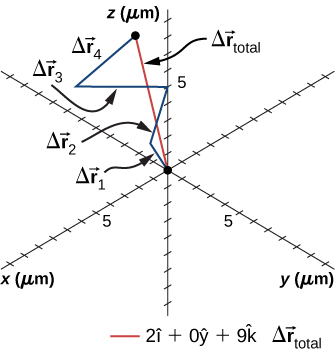
Figure 4.6 Trajectory of a particle undergoing random displacements of Brownian motion. The total displacement is shown in red.
Solution
Show Answer
We form the sum of the displacements and add them as vectors:$$\begin{array}{cc}\hfill \text{Δ}{\overset{\to }{r}}_{\text{Total}}& =\sum \text{Δ}{\overset{\to }{r}}_{i}=\text{Δ}{\overset{\to }{r}}_{1}+\text{Δ}{\overset{\to }{r}}_{2}+\text{Δ}{\overset{\to }{r}}_{3}+\text{Δ}{\overset{\to }{r}}_{4}\hfill \\ & =(2.0-1.0+4.0-3.0)\hat{i}+(1.0+0-2.0+1.0)\hat{j}+(3.0+3.0+1.0+2.0)\hat{k}\hfill \\ & =2.0\hat{i}+0\hat{j}+9.0\hat{k}\mu \text{m}.\hfill \end{array} $$ To complete the solution, we express the displacement as a magnitude and direction,
$$|\text{Δ}{\overset{\to }{r}}_{\text{Total}}|=\sqrt{{2.0}^{2}+{0}^{2}+{9.0}^{2}}=9.2\,\mu \text{m,}\quad \theta ={\text{tan}}^{-1}(\frac{9}{2})=77\text{°}, $$ with respect to the x-axis in the xz-plane.
Significance
From the figure we can see the magnitude of the total displacement is less than the sum of the magnitudes of the individual displacements.
Tag » How To Find Magnitude Of Displacement
-
Position And Displacement
-
How To Calculate The Total Magnitude Of Displacement - Sciencing
-
What Is The Formula For Calculating The Magnitude Of Displacement?
-
Displacement - Calculating Magnitude And Direction - YouTube
-
Displacement Formula With Examples - Byju's
-
How Can I Calculate The Magnitude Of Displacement? - Socratic
-
How Can I Calculate The Magnitude Of Displacement? - Vedantu
-
Displacement - Kinematics Fundamentals - OpenStax CNX
-
How To Calculate Displacement - Pediaa.Com
-
Finding The Magnitude Of Displacement With A Given Parametric ...
-
What Is Displacement? (article) | Khan Academy
-
Displacement Calculator S = (1/2)( V + U )t
-
Question Video: Finding The Magnitude Of The Displacement Vector