Droite D'Euler - Wikipédia
Maybe your like
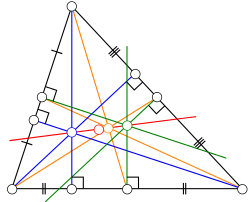
En géométrie euclidienne, dans un triangle non équilatéral, la droite d'Euler est une droite passant par plusieurs points remarquables du triangle, dont l'orthocentre, le centre de gravité (ou isobarycentre) et le centre du cercle circonscrit.
Cette notion s'étend au quadrilatère inscriptible et au tétraèdre.
Présentation
[modifier | modifier le code]C’est Robert Simson qui, le premier[1], découvre que dans un triangle non équilatéral (ABC), l'orthocentre H, le centre de gravité (ou isobarycentre) G et le centre du cercle circonscrit O sont alignés. Quelques années plus tard, Leonhard Euler en fournit une démonstration dans l’ouvrage Solutions faciles de problèmes difficiles en géométrie, publié en latin en 1765 ; il y détermine les relations de proportionnalité entre les distances : HO = 32HG et GO = 12HG[2]. La droite (HGO) passe également par le centre Ω du cercle des neuf points, milieu du segment [OH], ainsi que par d'autres points remarquables du triangle[3]. Les quatre points H,G,O,Ω sont confondus pour un triangle équilatéral (et sinon, ils sont tous distincts).
Parmi les autres points remarquables de la droite d'Euler, on peut citer le point de Longchamps, le point de Schiffler, le point d'Exeter et le perspecteur de Gossard.
En revanche, le centre du cercle inscrit dans le triangle n'en fait pas partie, sauf si celui-ci est isocèle. Dans ce cas, la droite d'Euler est l'axe de symétrie du triangle.
Détermination
[modifier | modifier le code]
Relation vectorielle d'Euler
[modifier | modifier le code]La relation vectorielle d'Euler : exprime à la fois l'alignement de et leur disposition mutuelle.
Démonstration de la relation d'Euler

Si l'on admet la relation de Sylvester qui s'écrit :

la relation d'Euler s'en déduit directement puisque le centre de gravité ou isobarycentre du triangle vérifie .

On peut également démontrer l'égalité à l'aide de l'homothétie de centre G et de rapport -1/2. La position de G au deux tiers des médianes permet de dire que l'image de (ABC) par cette homothétie est le triangle ayant pour sommets les milieux des côtés du triangle (ABC). Les images des hauteurs par cette homothétie sont des droites parallèles aux hauteurs et passant par sont les médiatrices du triangle (ABC). L'image de H, point de concours des hauteurs, est alors O, le point de concours des médiatrices. Les points G, H et O sont donc bien alignés et on a : d'où


Représentations
[modifier | modifier le code]Équation
[modifier | modifier le code]On note les angles aux sommets du triangle de référence, et on considère un point M de coordonnées trilinéaires (x : y : z). L'équation de la droite d'Euler s'écrit alors


En coordonnées barycentriques , l'équation s'écrit [4]


Représentation paramétrique
[modifier | modifier le code]On sait que le centre du cercle circonscrit a pour coordonnées trilinéaires (cos A : cos B : cos C) et que celles de l'orthocentre sont ( cos B cos C : cos C cos A : cos A cos B). Ainsi, tout point de la droite d'Euler différent de l'orthocentre a pour coordonnées trilinéaires :

avec t réel.
Ainsi, on obtient :
- le centre du cercle circonscrit pour t = 0,
- le centre de gravité, de coordonnées (cos A + cos B cos C : cos B + cos C cos A : cos C + cos A cos B), pour t = 1,
- le centre du cercle d'Euler, de coordonnées (cos A + 2cos B cos C : cos B + 2cos C cos A : cos C + 2cos A cos B), pour t = 2,
- le point de Longchamps, de coordonnées (cos A – cos B cos C : cos B – cos C cos A : cos C – cos A cos B), pour t = –1.
Longueurs des segments
[modifier | modifier le code]Les longueurs des différents segments s'expriment en fonction des trois côtés du triangle et du rayon du cercle circonscrit : et donc, d'après la relation d'Euler ci-dessus,


où et est le rayon du cercle circonscrit à [5],[6].



Comme de plus, , s'expriment comme fonctions symétriques des longueurs a, b et c.
Démonstration de l'égalité concernant OG

D'après la formule de la fonction scalaire de Leibnitz , on a :


On a donc :

Considérons maintenant le point A', symétrique de A par rapport au milieu I1 de [BC].
- D'une part,
- D'autre part, (ABA'C) est un parallélogramme, et la règle du parallélogramme indique que :


Donc


et finalement :

Extension au tétraèdre
[modifier | modifier le code]
Le tétraèdre possède aussi une droite remarquable, désignée par analogie "droite d'Euler". Elle est définie pour un tétraèdre non équifacial par les trois points suivants :
- le centre de gravité G, point d'intersection des quatre droites joignant un sommet au centre de gravité de la face opposée, ainsi que des trois droites joignant les milieux de deux arêtes opposées
- le point de Monge M, intersection des six plans orthogonaux à une arête et passant par le milieu de l'arête opposée [7]
- le centre de la sphère circonscrite O.
Le centre de gravité est le milieu du segment joignant centre de la sphère circonscrite au point de Monge .

Il existe aussi une sphère des douze points, ou première sphère d'Euler, dont le centre se trouve sur la droite d'Euler .


Références
[modifier | modifier le code]- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Euler line » (voir la liste des auteurs).
- ↑ Yvan Monka, « La droite d’Euler », sur Maths et tiques (consulté le 4 juillet 2025).
- ↑ (la) Leonhard Euler, Solutio facilis problematum quorundam geometricorum difficillimorum (lire en ligne) sur le site de Euler Archive, rem page 114.
- ↑ (en) Eric W. Weisstein, « Euler Line », sur MathWorld
- ↑ (en) J.A. Scott, « Some examples of the use of areal coordinates in triangle geometry », Mathematical Gazette, no 83, novembre 1999, p. 472-477.
- ↑ La preuve donnée ici est inspirée de celle donnée par Alexander Bogomolny sur la page Sum of Squares of Distances to Vertices de Cut The Knot.
- ↑ Une autre preuve, faisant appel aux nombres complexes, est proposée par Bogomolny sur la page Distance between the Orthocenter and Circumcenter
- ↑ Point de Monge d'un tétraèdre.
Voir aussi
[modifier | modifier le code]Articles connexes
[modifier | modifier le code]- Cercle d'Euler
- Fonction de Leibniz
- Liste de sujets portant le nom de Leonhard Euler
Bibliographie
[modifier | modifier le code]- Jean-Denis Eiden, Géométrie analytique classique, Calvage et Mounet, 2009 (ISBN 978-2-91-635208-4)
- Petite encyclopédie de mathématique, Didier
- Jean Fresnel, Méthodes modernes en géométrie, Paris, Hermann, 2010, 3e éd., 411 p. (ISBN 978-2-7056-7084-9)
- Bruno Ingrao, Coniques affines, euclidiennes et projectives, Calvage et Mounet (ISBN 978-2-916352-12-1)
| v · mTriangles | |
|---|---|
| Description |
|
| Types |
|
| Points remarquables (Nombre de Kimberling) |
|
| Droites remarquables |
|
| Cercles remarquables |
|
| Triangles remarquables |
|
| Courbes remarquables |
|
| Théorèmes |
|
| Relations entre triangles |
|
| Résolution |
|
 Portail de la géométrie
Portail de la géométrie
Tag » Approfondissement La Droite D'euler
-
La Droite D'Euler | Superprof
-
Droite D'Euler - Les
-
Droite Et Cercle D'Euler - Descartes Et Les Mathématiques
-
Enseigner : Mathématiques Lycée - La Droite D'Euler - Ac-reims
-
La Droite D'Euler - Maths Et Tiques
-
[PDF] Index.pdf - Melusine
-
Géométrie - Droite Et Cercle D Euler - PDF Free Download
-
[PDF] LE CERCLE - APAMS
-
[PDF] Exercice 2 : Effectuer Les Calculs Suivants « Astucieusement » : A = 50
-
[PDF] Allocation De Capital : Théorie Et Pratique De La Méthode D'Euler
-
[PDF] MATHÉMATIQUES. - Numdam
-
[PDF] Programme De Mathématiques De Première Générale
-
[PDF] La Géométrie Des Tétraèdres
-
Définition De Triangle Et Synonymes De Triangle (français)