Interfacing TB6600 Stepper Motor Driver With Arduino - ElectroPeak
Maybe your like
Contents
- Motors & Drivers
-
 Written by Amir Mohammad Shojaei
Written by Amir Mohammad Shojaei

Discover the amazing capabilities of the TB6600 stepper motor driver when paired with an Arduino. This comprehensive guide will walk you through the process of interfacing these two powerful components. By following this guide, you’ll be able to adjust microsteps, understand pinouts, and even explore code examples.
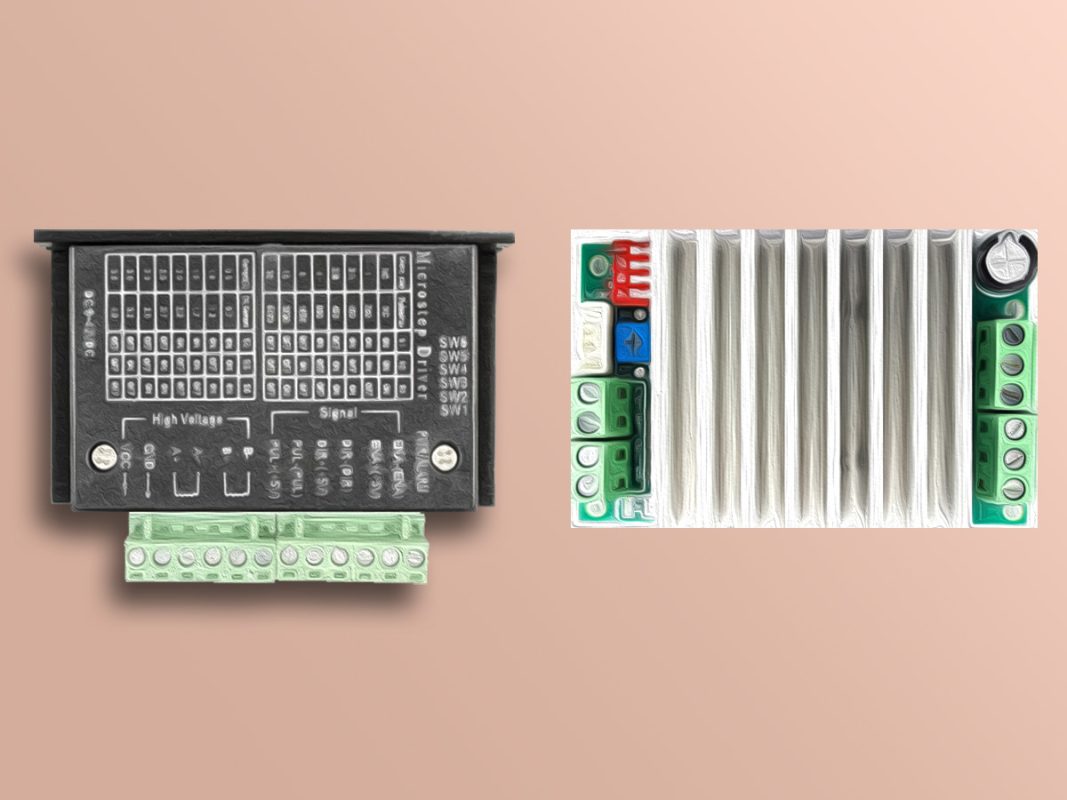
TB6600 Stepper Motor Driver Features
The TB6600 is an easy-to-use professional stepper motor driver that you can adjust its microsteps. This module could control a two-phase stepping motor. A key feature of this module is that you can change the microstep settings by the built-in switches on the driver.
These modules have several safety functions as follows:
- Overcurrent protection
- under-voltage shutdown
- overheating protection
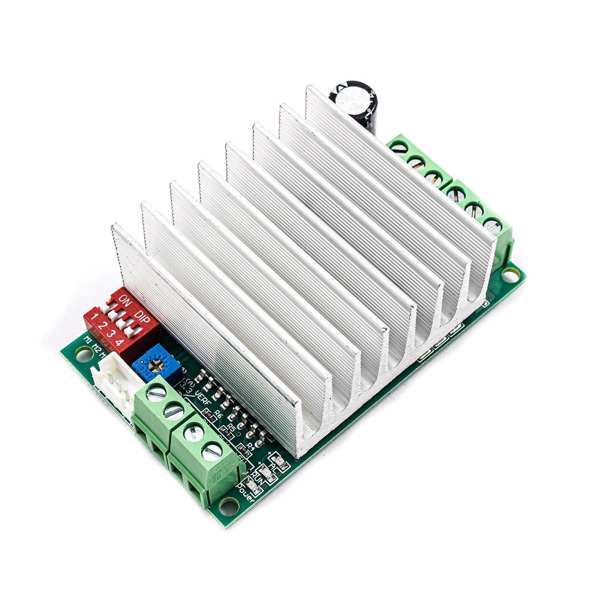
There are 2 kinds of this module: 4 Amps and 4.5 Amps. Both have similar functions. You can see these modules in the image below.

You can download the datasheet of this module here.
![]()
TB6600 4A Stepper Motor Driver Datasheet
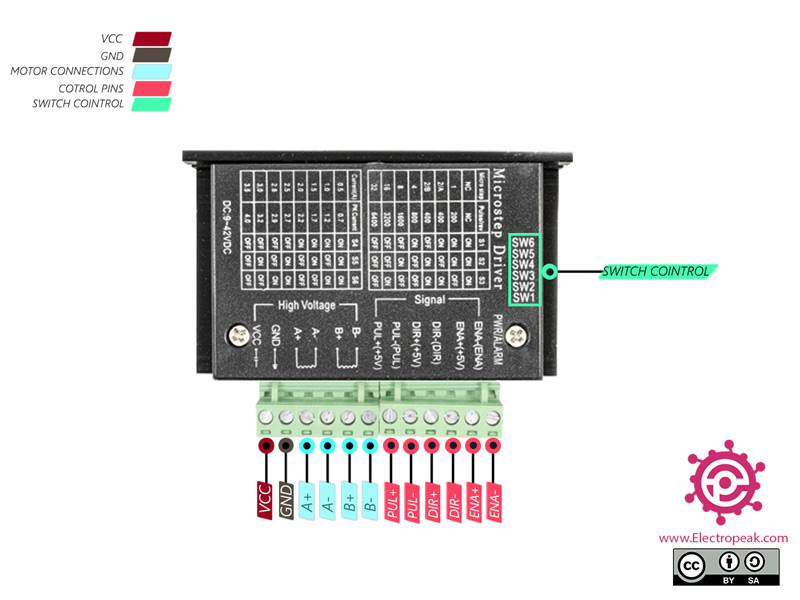
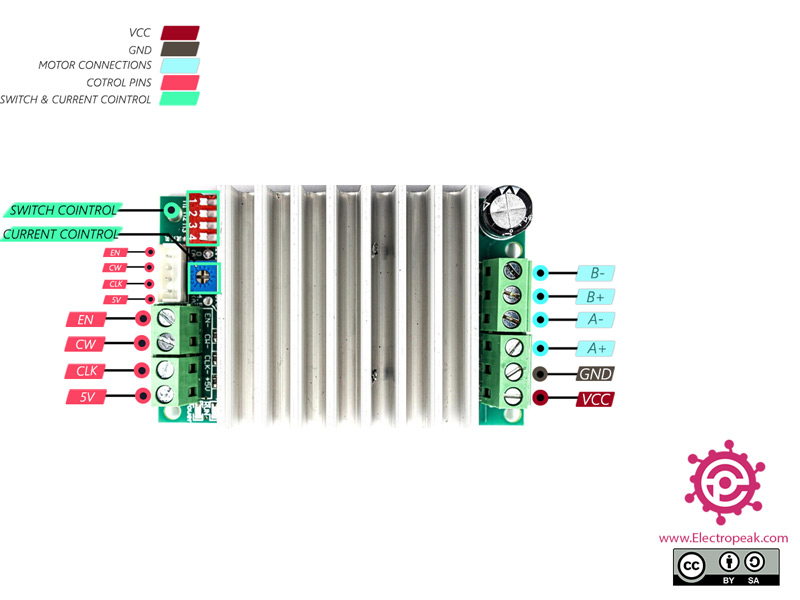
1 file(s) 995.27 KB DownloadTB6600 Stepper Motor Driver Pinout
This Module has the following pins:
High Voltage
- VCC: Motor power supply – 9-42V for 4A type and max 32V for 4.5A type
- GND: Ground
- A+: Positive pin of coil 1
- A-: Negative pin of coil 1
- B+: Positive pin of coil 2
- B-: Negative pin of coil 2
Signal
- PUL(CLK): Pins for controlling rotation steps
- DIR(CW): Pins for controlling rotation steps
- ENA: Enable the driver pin
- 5V: Voltage – 5V
Note
There are 2 way that you can command the PUL, DIR and ENA pins in 4A type:
- Connect The negative pins to ground and do the control by positive pins. (Active -HIGH)
- Connect the positive pins to 5 volts and do the control by negative pins. (Active -LOW)
Note
For the 4.5A type, the other pins are activated with LOW voltage because there is a 5V pin in the control pins.
TB6600 stepper motor driver control switches
These switches are used to control the microstep resolution and limiting the driver current.
You can change the microstep resolution from full step to 1/32 step by switching the switches S1 to S3.

Note
There is no 1/32 step in 4.5A type.
You can adjust the current that goes to the motor when it is running by setting the dip switches S4, S5, and S6 on or off.
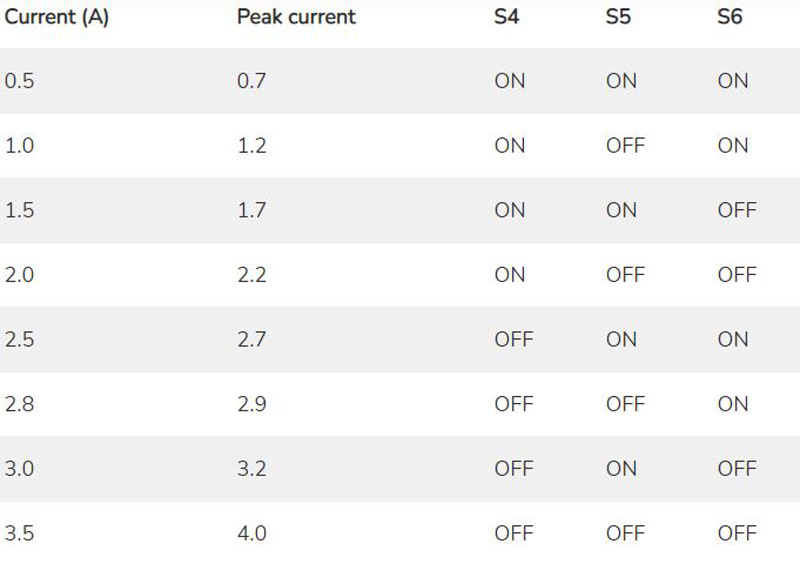
Note
In 4.5A type, you can adjust and limit the current by the potentiometer.
You can see the pinout of this module in the image below.
Required Material
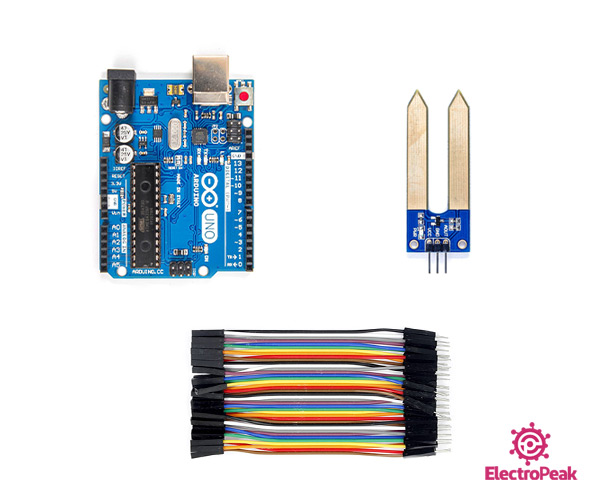
Required Material
| Arduino UNO R3 | × | 1 |
| TB6600 4A Stepper Motor Driver | × | 1 |
| TB6600 4.5A Stepper Motor Driver | × | 1 |
| BYGH403 1.65A Stepper Motor | × | 1 |
| Male to Male Jumper Wire | × | 1 |
Software Apps
| Arduino IDE |
Note
Use a power supply with a proper current and voltage to power the motor.
Note
For this tutorial, prepare only one type of TB6600.
Interfacing TB6600 Stepper Motor Driver with Arduino
To begin interfacing the TB6600 stepper motor driver with an Arduino, follow these steps:
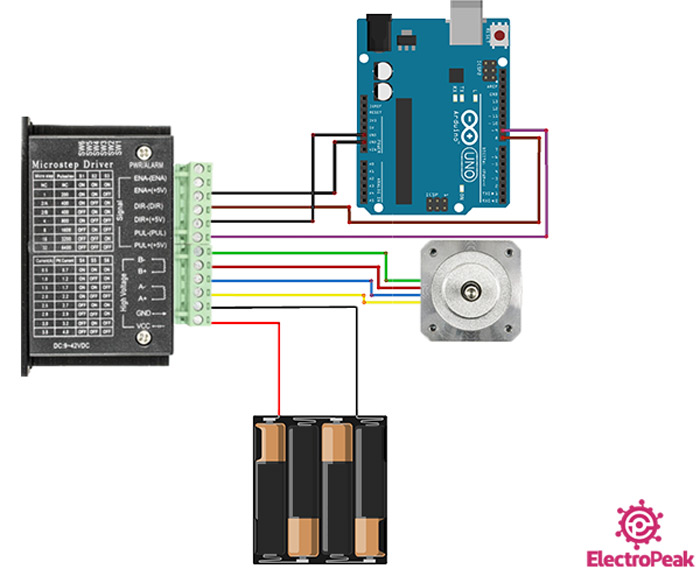
Step 1: Circuit
Note
You can use a multimeter to find the two wires from one coil.Place the multimeter on short circuit test and test the wires in pairs. The two wires that were short circuited while connecting to the multimeter are both sides of one coil.
The following circuit show how you should connect Arduino and stepper motor to 4A type. Connect wires accordingly.
Note
You can limit the current with the dip switches according to power supply that you have chosen.
Note
In this tutorial, we set switches 3 and 6 to Off. Therefore, the driver will be in full step mode and the continuous current is 1.5A.
Note
We have connected the negative side of control pins to ground and controlled these pins by commanding to the positive side. (Active-High)
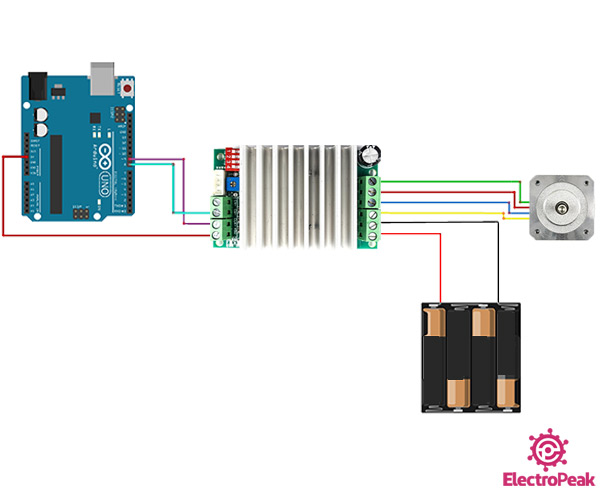
The 4.5A type is also connected to other parts as shown below:
Step 2: Code
Upload the following code to Arduino.
/* TB6600-Stepper-Motor-Driver made on 15 Dec 2020 by Amir Mohammad Shojaee @ ElectropeakHome*/ #define dirPin 8 #define stepPin 9 void setup() { // Declare pins as output: pinMode(stepPin, OUTPUT); pinMode(dirPin, OUTPUT); // Set the spinning direction CW/CCW: digitalWrite(dirPin, HIGH); } void loop() { // These four lines result in 1 step: digitalWrite(stepPin, HIGH); delayMicroseconds(500); digitalWrite(stepPin, LOW); delayMicroseconds(500); }
Connect pin 8 to DIR (CW) and pin 9 to PUL (CLK). Set DIR pin to High. The rotation direction of the stepper motor is clockwise in 4A type and counter-clockwise in 4.5A type. The motor then rotates by creating a square pulse with the step pin.
Next, we want to change the step manually by the driver switches. For example, first we set pin S1 and then S2 to off. By doing this, the driver step in 4A type, first becomes 1/8 and then 1/32. Finally, by increasing the step, the motor speed decreases and its resolution increases. In the 4.5A type, the driver step first becomes 1/8 and then stops because it doesn’t have a 1/32 step.
By following these steps and understanding the code, you’ll be able to effectively interface the TB6600 stepper motor driver with your Arduino and harness its full potential.
Now you are ready to embark on an exciting journey of controlling stepper motors using the powerful TB6600 driver in conjunction with your Arduino. Enjoy exploring the endless possibilities of precise motor control and automation!
Liked What You See? Get Updates And Learn From The Best SubscribeLeave a Reply Cancel reply
Your email address will not be published. Required fields are marked *
Comment *
Name *
Email *
Website
Save my name, email, and website in this browser for the next time I comment.
Be The First To Know Subscribe Subscribe to receive monthly life-changing updates
Subscribe Subscribe to receive monthly life-changing updates Tag » Arduino Uno Tb6600 Wiring
-
TB6600 And Arduino - Wiring And Demonstration - YouTube
-
TB6600 Stepper Motor Driver With Arduino Tutorial
-
TB6600 Stepper Motor Driver With Arduino Tutorial (3 Examples)
-
Updated TB6600 Stepper Driver Config? - Arduino Forum
-
Vertical Plotter -wiring The Tb6600 - Arduino Forum
-
Arduino Uno And TB-6600 Connection
-
Arduino Uno R3 And TB6600 Connection Diagram
-
Arduino And TB6600 Microcontroller Wiring Schematics
-
Wiring And Running TB6600 Stepper Driver With Arduino - DIY Projects
-
Need Help! TB6600 Wiring Diagram With Arduino Grbl CNC Shield
-
CNC Controller With Arduino, TB6600 And GRBL
-
Nema Stepper Motor 23 With Tb6600 Driver With Arduino Due
-
TB6600 Arduino Stepper Motor Driver - DFRobot