Bài 4. Hệ Trục Tọa độ - Củng Cố Kiến Thức
1. Trục và độ dài đại số trên trục
a) Trục toạ độ (hay gọi tắt là trục) là một đường thẳng trên đó đã xác định một điểm O gọi là điểm gốc và một vectơ đơn vị $\overrightarrow e $.
Ta kí hiệu trục đó là (O ; $\overrightarrow e $)
![]()
b) Cho M là một điểm tuỳ ý trên trục (O ; $\overrightarrow e $). Khi đó có duy nhất một số k sao cho $\overrightarrow {OM} = k\overrightarrow e $. Ta gọi số k đó là toạ độ của điểm M đối với trục đã cho.
c) Cho hai điểm A và B trên trục (O ; $\overrightarrow e $). Khi đó có duy nhất số a sao cho $\overrightarrow {AB} = a\overrightarrow e $. Ta gọi số a đó là độ dài đại số của vectơ $\overrightarrow {AB} $ đối với trục đã cho và kí hiệu $a = \overline {AB} $.
Nhận xét
Nếu $\overrightarrow {AB} $ cùng hướng với $\overrightarrow e $ thì $\overline {AB} = AB$, còn nếu $\overrightarrow {AB} $ ngược hướng với $\overrightarrow e $ thì $\overline {AB} = - AB$.
Nếu hai điểmA và B trên trục (O ; $\overrightarrow e $) có toạ đô lần lượt là a và b thì $\overline {AB} = b - a$.
2. Hệ trục tọa độ
a) Định nghĩa
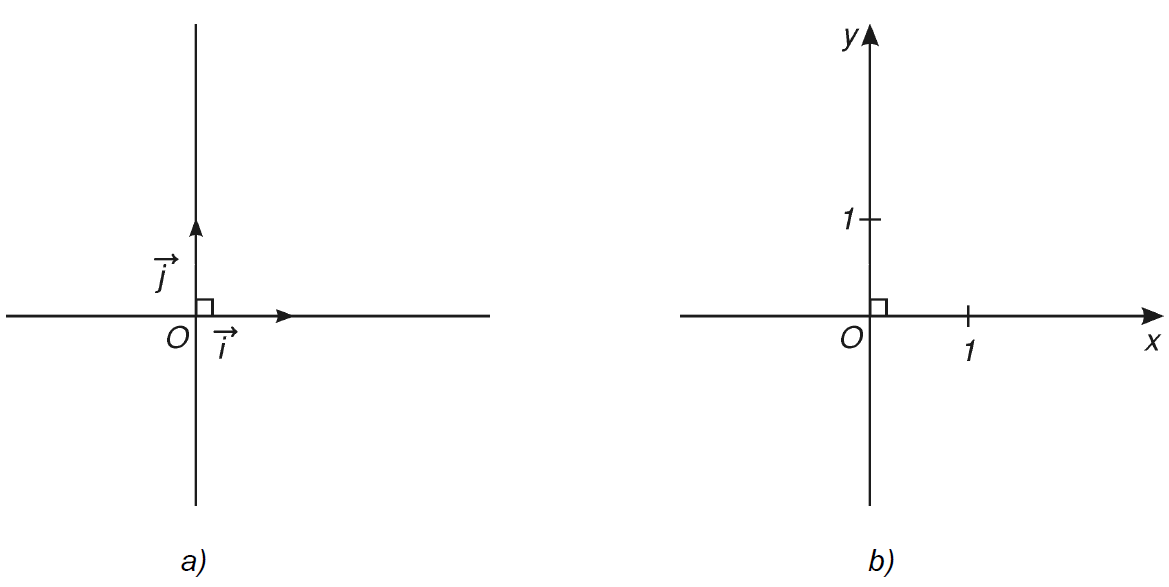
Hệ trục toạ độ $\left( {O;\overrightarrow i ;\overrightarrow j } \right)$ gồm hai trục $\left( {O;\overrightarrow i } \right)$ và $\left( {O;\overrightarrow j } \right)$ vuông góc với nhau. Điểm gốc O chung của hai trục gọi là gốc toạ độ. Trục $\left( {O;\overrightarrow i } \right)$được gọi là trục hoành và kí hiệu là Ox, trục $\left( {O;\overrightarrow j } \right)$ được gọi là trục tung và kí hiệu là Oy. Các vectơ $\overrightarrow i $ và $\overrightarrow j $ là các vectơ đơn vị trên Ox và Oy và $\left| {\overrightarrow i } \right| = \left| {\overrightarrow j } \right| = 1$. Hệ trục toạ độ $\left( {O;\overrightarrow i ;\overrightarrow j } \right)$còn được kí hiệu là Oxy.
b) Tọa độ của vectơ
$\overrightarrow u = \left( {x;y} \right) \Leftrightarrow \overrightarrow u = x\overrightarrow i + y\overrightarrow j $
Nhận xét
Từ định nghĩa toạ độ của vectơ, ta thấy hai vectơ bằng nhau khi và chỉ khi chúng có hoành độ bằng nhau và tung độ bằng nhau.
Nếu $\overrightarrow u = \left( {x;y} \right);\overrightarrow {u'} = \left( {x';y'} \right)$ thì
$\overrightarrow u = \overrightarrow {u'} \Leftrightarrow \left\{ \begin{array}{l} x = x'\\ y = y' \end{array} \right.$
Như vậy, mỗi vectơ được hoàn toàn xác định khi biết toạ độ của nó.
c) Toạ độ của một điểm
Trong mặt phẳng toạ độ Oxy cho một điểm M tuỳ ý. Toạ độ của vectơ $\overrightarrow {OM} $ đối với hệ trục Oxy được gọi là toạ độ của điểm M đối với hệ trục đó.
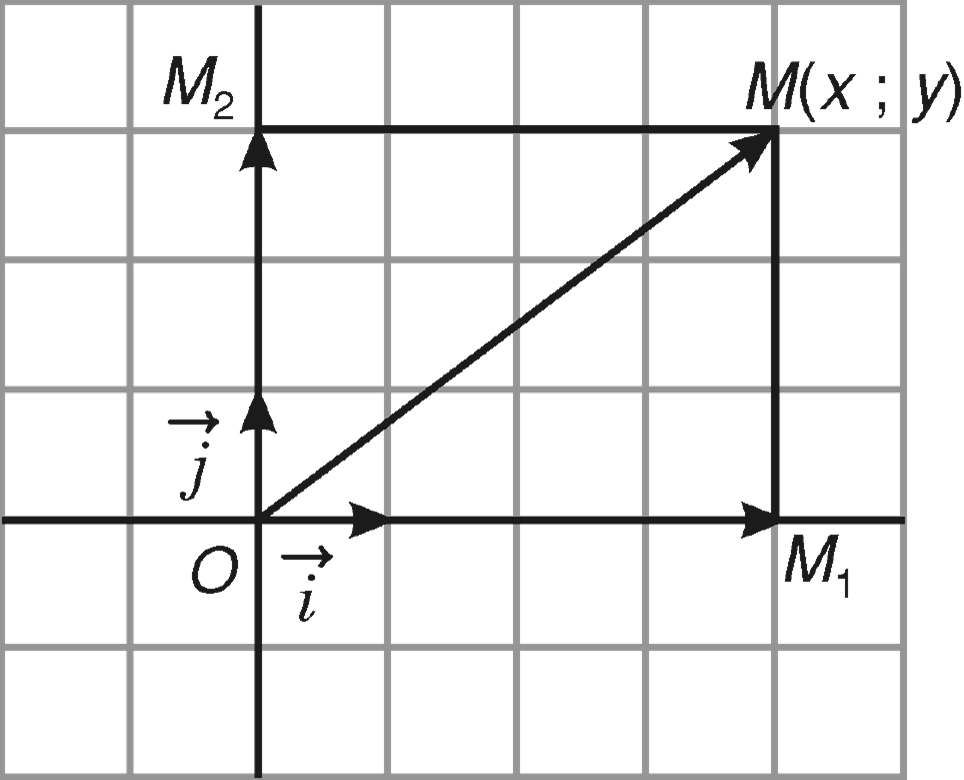
$M = \left( {x;y} \right) \Leftrightarrow \overrightarrow {OM} = x\overrightarrow i + y\overrightarrow j $
Chú ý: nếu $M{M_1} \bot Ox,M{M_2} \bot Oy$ thì $x = \overline {O{M_1}} ,y = \overline {O{M_2}} $.
d) Liên hệ giữa tọa độ của điểm và tọa độ của vectơ trong mặt phẳng
Cho điểm $A\left( {{x_A};{y_A}} \right)$ và $B\left( {{x_B};{y_B}} \right)$. Ta có:
$\overrightarrow {AB} = \left( {{x_B} - {x_A};{y_B} - {y_A}} \right)$
3. Tọa độ của các vectơ $\overrightarrow u + \overrightarrow v ,\overrightarrow u - \overrightarrow v ,k\overrightarrow u $
Ta có các công thức sau:
Cho $\overrightarrow u = \left( {{u_1};{u_2}} \right),\overrightarrow v = \left( {{v_1};{v_2}} \right)$. Khi đó:
$\begin{gathered} \overrightarrow u + \overrightarrow v = \left( {{u_1} + {v_1};{u_2} + {v_2}} \right); \hfill \\ \overrightarrow u - \overrightarrow v = \left( {{u_1} - {v_1};{u_2} - {v_2}} \right); \hfill \\ k\overrightarrow u = \left( {k{u_1};k{u_2}} \right),k \in R \hfill \\ \end{gathered} $
4. Tọa độ trung điểm của đoạn thẳng. Tọa độ của trọng tâm tam giác
a) Cho đoạn thẳng AB có $A\left( {{x_A};{y_A}} \right),B\left( {{x_B};{y_B}} \right)$. Ta dễ dàng chứng minh được toạ độ trung điểm $I\left( {{x_I};{y_I}} \right)$ của đoạn thẳng AB là :
${x_I} = \frac{{{x_A} + {x_B}}}{2};{y_I} = \frac{{{y_A} + {y_B}}}{2}$
b) Cho tam giác ABC có $A\left( {{x_A};{y_A}} \right),B\left( {{x_B};{y_B}} \right),C\left( {{x_C};{y_C}} \right)$. Khi đó toạ đô của trọng tâm $G\left( {{x_G};{y_G}} \right)$ của tam giác ABC được tính theo công thức:
${x_G} = \frac{{{x_A} + {x_B} + {x_C}}}{3};{y_G} = \frac{{{y_A} + {y_B} + {y_C}}}{3}$
Từ khóa » Trục Vector
-
Hình ảnh Trục Các Vector Biểu Tượng PNG , Trục, Biểu ... - Pngtree
-
Hệ Tọa độ Descartes – Wikipedia Tiếng Việt
-
Các Phương Pháp Xoay Vector Trong Không Gian 2D Và 3D - Viblo
-
Điện Tâm đồ: Nguyên Tắc Phân Tích Trục điện Tim
-
Phương Pháp: Đơn Trục đa Vecto - Thầy Vũ Ngọc Anh - YouTube
-
Lý Thuyết Hệ Trục Tọa độ | SGK Toán Lớp 10
-
Trục Cáp Tàu điều Khiển Láp Dẻo 3mm Kèm Chân Vịt Lỗ 4mm ... - Shopee
-
"Trục Cuốn" - 373.551 Ảnh, Vector Và Hình Chụp Có Sẵn | Shutterstock
-
Vector Vận Tốc Và Vector Gia Tốc Cùng Chiều Dương Của Trục Ox Trong ...
-
AVEC: Trục Vector động Cơ Tổng Công Ty - Abbreviation Finder
-
Hình Học 10/Chương I/§4. Hệ Trục Tọa độ - VLOS
-
Một Số Kiến Thức Về động Học (P2) | POL
-
[PDF] Chương 3: Vec-tơ - Vật Lý Mô Phỏng