Bài Tập Dài - Lý Thuyết điều Khiển Tự động - TaiLieu.VN
Có thể bạn quan tâm
Thiết kế hệ thống điều khiển tự động có: -Khâu điều chỉnh PID có hàm truyền: WPID(s)=Kp(1+ +Td.s) -Đối tượng điều khiển là một khâu quán tính bậc nhất và khâu trễ có hàm truyền : WĐT(s)= e-Ls/(Ts+1) -Các tham số L,T của đối tương điều khiển: L=9;T=15 *Sơ đồ khối hệ thống điều khiển như sau:
Chủ đề:
tanlangLý thuyết điều khiển tự động
Bài tập Lý thuyết điều khiển tự động
SaveLikeShareReport Download AI tóm tắt /17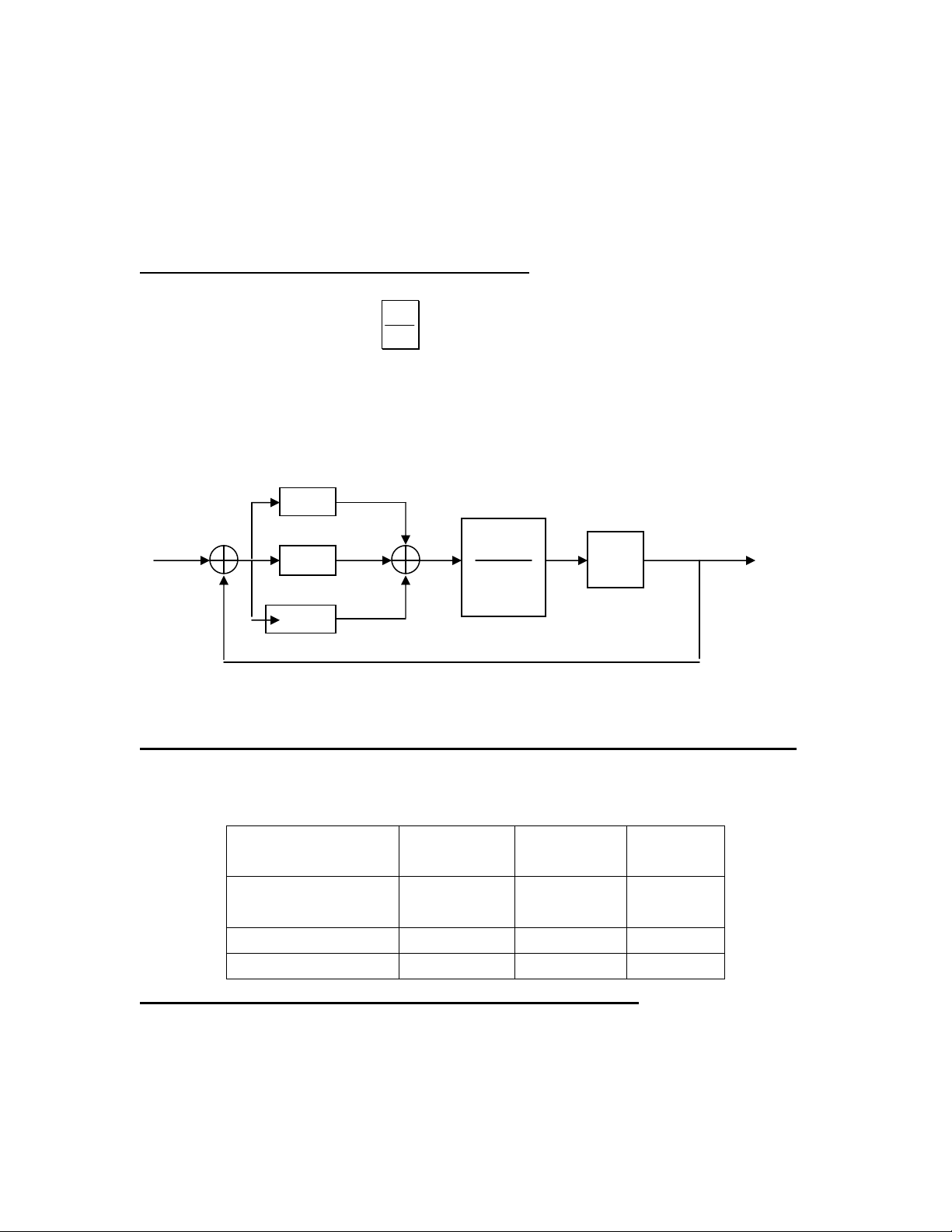 Bài tập dài LTĐKTĐ Bài tập dài môn học Lý thuyết điều khiển tự động I.Thiết kế hệ thống điều khiển tựđộng có: -Khâu điều chỉnh PID có hàm truyền: WPID(s)=Kp(1+sTi.1 +Td.s) -Đối tượng điều khiển là một khâu quán tính bậc nhất và khâu trễ có hàm truyền : WĐT(s)= e-Ls/(Ts+1) -Các tham số L,T của đối tương điều khiển: L=9;T=15 *Sơđồ khối hệ thống điều khiển như sau: Input + + + Output - + Ki=Kp/Ti; Kd=Kp.Td; II.Tính toán các tham số Kp,Ti,Td đảm bảo tính ổn định của hệ thống: -Theo Ziegler-Nichols thì để đảm bảo tính ổn định của hệ thống trên cần có các tham số Kp,Ti,Td thoả mãn bảng sau ứng với từng bộ điều khiển: Các bộ điều khiển Kp Ti Td P T/L ∞ 0 PI 0.9T/L L/0.3 0 PID 1.2T/L 2L 0.5L III.Xét tính ổn định.Tìm các điểm cực và điểm không. Khảo sát chất lượng của hệ thống với từng khâu điều khiển. 1.Khâu điều khiển P : a) Chương trình chạy trên MATLAB: >>L=9;T=15;Kp=T/L;n=3; KpKi/s KD.s1 T.s+1e-Ls
Bài tập dài LTĐKTĐ Bài tập dài môn học Lý thuyết điều khiển tự động I.Thiết kế hệ thống điều khiển tựđộng có: -Khâu điều chỉnh PID có hàm truyền: WPID(s)=Kp(1+sTi.1 +Td.s) -Đối tượng điều khiển là một khâu quán tính bậc nhất và khâu trễ có hàm truyền : WĐT(s)= e-Ls/(Ts+1) -Các tham số L,T của đối tương điều khiển: L=9;T=15 *Sơđồ khối hệ thống điều khiển như sau: Input + + + Output - + Ki=Kp/Ti; Kd=Kp.Td; II.Tính toán các tham số Kp,Ti,Td đảm bảo tính ổn định của hệ thống: -Theo Ziegler-Nichols thì để đảm bảo tính ổn định của hệ thống trên cần có các tham số Kp,Ti,Td thoả mãn bảng sau ứng với từng bộ điều khiển: Các bộ điều khiển Kp Ti Td P T/L ∞ 0 PI 0.9T/L L/0.3 0 PID 1.2T/L 2L 0.5L III.Xét tính ổn định.Tìm các điểm cực và điểm không. Khảo sát chất lượng của hệ thống với từng khâu điều khiển. 1.Khâu điều khiển P : a) Chương trình chạy trên MATLAB: >>L=9;T=15;Kp=T/L;n=3; KpKi/s KD.s1 T.s+1e-Ls  Bài tập dài LTĐKTĐ >> [n,d]=pade(L,n) n = -1.0000 1.3333 -0.7407 0.1646 d = 1.0000 1.3333 0.7407 0.1646 >> Wtre=tf(n,d) Transfer function: -s^3 + 1.333 s^2 - 0.7407 s + 0.1646 ------------------------------------ s^3 + 1.333 s^2 + 0.7407 s + 0.1646 >> Wdt=tf(1,[T 1])*Wtre Transfer function: -s^3 + 1.333 s^2 - 0.7407 s + 0.1646 --------------------------------------------- 15 s^4 + 21 s^3 + 12.44 s^2 + 3.21 s + 0.1646 >> Wpid=Kp; >> W=feedback(Wpid*Wdt,1) Transfer function: -1.667 s^3 + 2.222 s^2 - 1.235 s + 0.2743 ------------------------------------------------ 15 s^4 + 19.33 s^3 + 14.67 s^2 + 1.975 s + 0.439 >> [p z]=pzmap(W) p = -0.5895 + 0.6817i -0.5895 - 0.6817i -0.0549 + 0.1817i -0.0549 - 0.1817i z =
Bài tập dài LTĐKTĐ >> [n,d]=pade(L,n) n = -1.0000 1.3333 -0.7407 0.1646 d = 1.0000 1.3333 0.7407 0.1646 >> Wtre=tf(n,d) Transfer function: -s^3 + 1.333 s^2 - 0.7407 s + 0.1646 ------------------------------------ s^3 + 1.333 s^2 + 0.7407 s + 0.1646 >> Wdt=tf(1,[T 1])*Wtre Transfer function: -s^3 + 1.333 s^2 - 0.7407 s + 0.1646 --------------------------------------------- 15 s^4 + 21 s^3 + 12.44 s^2 + 3.21 s + 0.1646 >> Wpid=Kp; >> W=feedback(Wpid*Wdt,1) Transfer function: -1.667 s^3 + 2.222 s^2 - 1.235 s + 0.2743 ------------------------------------------------ 15 s^4 + 19.33 s^3 + 14.67 s^2 + 1.975 s + 0.439 >> [p z]=pzmap(W) p = -0.5895 + 0.6817i -0.5895 - 0.6817i -0.0549 + 0.1817i -0.0549 - 0.1817i z = 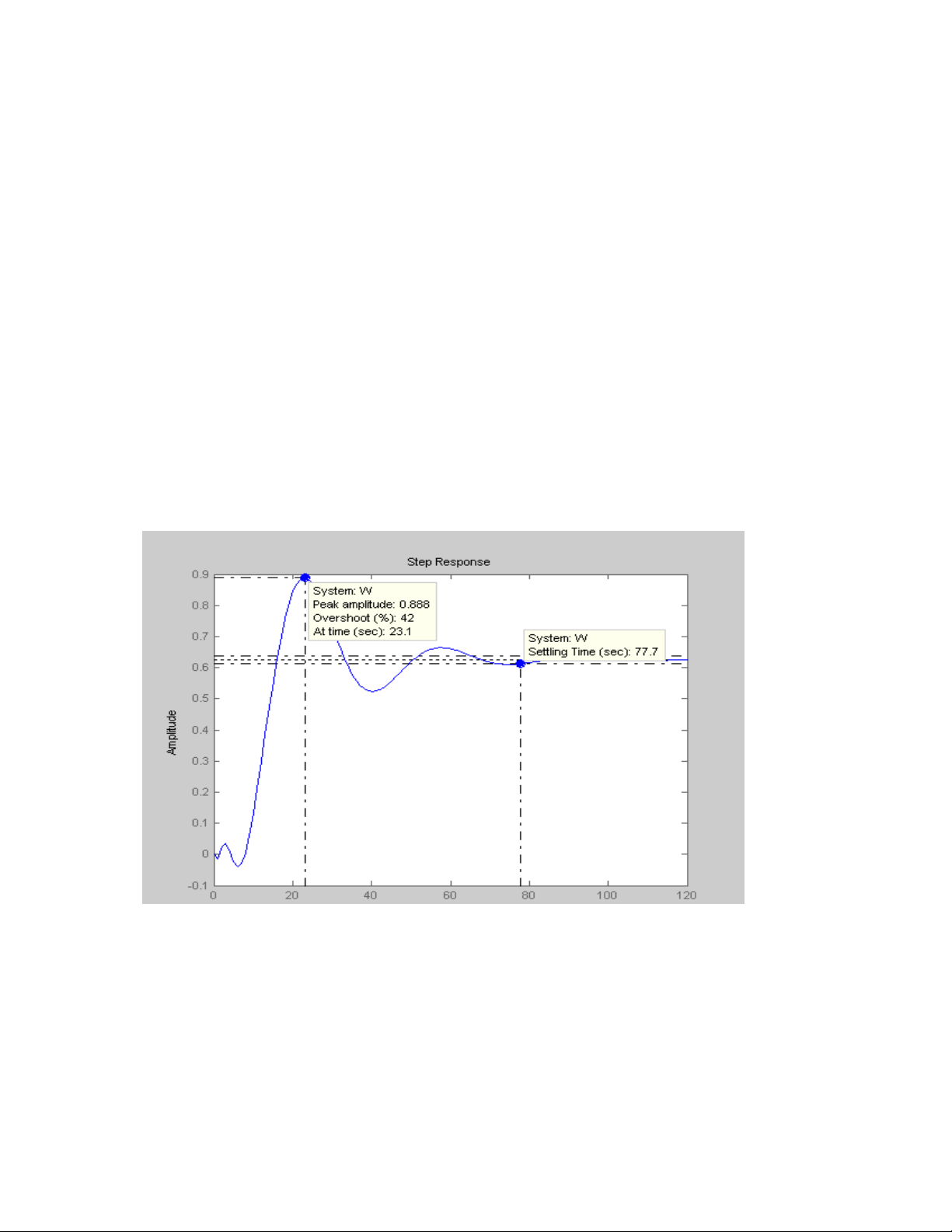 Bài tập dài LTĐKTĐ 0.4086 + 0.3899i 0.4086 - 0.3899i 0.5160 >> step(W) MATLAB cho kết quả sau: Hình 1 -Nhận thấy rằng với Kp nhận giá trị trong bảng Ziegler-Nichols thì hệthống ổn định với thời gian quá độ là 77.7sec và chỉ tiêu chất lượng σmax= 42% >20% b)Chỉnh định lại các tham số của luật điều khiển P
Bài tập dài LTĐKTĐ 0.4086 + 0.3899i 0.4086 - 0.3899i 0.5160 >> step(W) MATLAB cho kết quả sau: Hình 1 -Nhận thấy rằng với Kp nhận giá trị trong bảng Ziegler-Nichols thì hệthống ổn định với thời gian quá độ là 77.7sec và chỉ tiêu chất lượng σmax= 42% >20% b)Chỉnh định lại các tham số của luật điều khiển P  Bài tập dài LTĐKTĐ Như vậy với Kp = T/L chưa đạt mức chỉ tiêu yêu cầu là σ max dưới 20%.Ta chỉnh lại giá trị của Kp bằng 0.5*(T/L) thì được quá trình quá độ của hệthống và các điểm cực điểm không mới như sau:(Hình 2) T=15;L=9;Kp=1.2*(T/L);n=3;Ti=2*L;Td=0.5*L; Hình 2 Từ đồ thị trên ta có σmax=4.25% < 20% và thời gian quá độ là 59sec<77.7sec (Thời gian quá độ thực nghiệm Z-N).Vậy với Kp=0.5*(T/L) là đạt yêu cầu. -Các điểm cực và các điểm không mới:>> [p z]=pzmap(W) p = -1.0096 -0.2899 + 0.1343i
Bài tập dài LTĐKTĐ Như vậy với Kp = T/L chưa đạt mức chỉ tiêu yêu cầu là σ max dưới 20%.Ta chỉnh lại giá trị của Kp bằng 0.5*(T/L) thì được quá trình quá độ của hệthống và các điểm cực điểm không mới như sau:(Hình 2) T=15;L=9;Kp=1.2*(T/L);n=3;Ti=2*L;Td=0.5*L; Hình 2 Từ đồ thị trên ta có σmax=4.25% < 20% và thời gian quá độ là 59sec<77.7sec (Thời gian quá độ thực nghiệm Z-N).Vậy với Kp=0.5*(T/L) là đạt yêu cầu. -Các điểm cực và các điểm không mới:>> [p z]=pzmap(W) p = -1.0096 -0.2899 + 0.1343i  Bài tập dài LTĐKTĐ -0.2899 - 0.1343i -0.0771 + 0.0474i -0.0771 - 0.0474i z = 0.4086 + 0.3899i 0.4086 - 0.3899i 0.5160 -0.4208 -0.0792 2.Khâu điều chỉnh PI a) Chương trình chạy trên Matlab: >> L=9;T=15;Kp=0.9*(T/L);Ti=L/0.3;n=3; >> [n,d]=pade(L,n) n = -1.0000 1.3333 -0.7407 0.1646 d = 1.0000 1.3333 0.7407 0.1646 >> Wtre=tf(n,d) Transfer function: -s^3 + 1.333 s^2 - 0.7407 s + 0.1646 ------------------------------------ s^3 + 1.333 s^2 + 0.7407 s + 0.1646 >> Wdt=tf(1,[T 1])*Wtre Transfer function: -s^3 + 1.333 s^2 - 0.7407 s + 0.1646 --------------------------------------------- 15 s^4 + 21 s^3 + 12.44 s^2 + 3.21 s + 0.1646
Bài tập dài LTĐKTĐ -0.2899 - 0.1343i -0.0771 + 0.0474i -0.0771 - 0.0474i z = 0.4086 + 0.3899i 0.4086 - 0.3899i 0.5160 -0.4208 -0.0792 2.Khâu điều chỉnh PI a) Chương trình chạy trên Matlab: >> L=9;T=15;Kp=0.9*(T/L);Ti=L/0.3;n=3; >> [n,d]=pade(L,n) n = -1.0000 1.3333 -0.7407 0.1646 d = 1.0000 1.3333 0.7407 0.1646 >> Wtre=tf(n,d) Transfer function: -s^3 + 1.333 s^2 - 0.7407 s + 0.1646 ------------------------------------ s^3 + 1.333 s^2 + 0.7407 s + 0.1646 >> Wdt=tf(1,[T 1])*Wtre Transfer function: -s^3 + 1.333 s^2 - 0.7407 s + 0.1646 --------------------------------------------- 15 s^4 + 21 s^3 + 12.44 s^2 + 3.21 s + 0.1646 Tài liệu liên quan
![Đề cương đề tài nghiên cứu khoa học [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/duong297/135x160/26111763433948.jpg)
Đề cương Đề tài nghiên cứu khoa học
12 trang
Bài tập Lý thuyết điều khiển tự động
84 trang
Bài tập điều kiện lý thuyết điều khiển tự động
5 trang![Bài tập môn Điều khiển nâng cao [Chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2014/20140213/letankiep1991/135x160/7671392284043.jpg)
Bài tập môn Điều khiển nâng cao
4 trang
Bài tập Cơ sở điều khiển tự động
3 trang
Bài tập lớn lý thuyết điều khiển tự động
16 trang![Bài tập lý thuyết điều khiển hiện đại [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130417/le_xuan_trung/135x160/1419631_1510.jpg)
Bài tập lý thuyết điều khiển hiện đại
9 trang
Bài tập môn điều khiển tự động
14 trang
Bài tập điều khiển tự động
44 trang
BÀI TẬP DÀI MÔN ĐIỀU KHIỂN TỰ ĐỘNG
14 trangTài liêu mới

Đề thi học kỳ năm 2019 môn Kỹ thuật đo lường cảm biến có đáp án
6 trang
Bài giảng Cấu kiện điện tử: Chương 2 - Trường ĐH Bách Khoa HN
79 trang
Bài giảng Cấu kiện điện tử: Chương 1 - Trường ĐH Bách Khoa HN
6 trang
Đề thi cuối học kì 1 môn Dung sai - Kỹ thuật đo năm 2025-2026
14 trang
Đề thi cuối học kì 1 môn Kỹ thuật điện năm 2025-2026
6 trang
Đề thi cuối học kì 1 môn Điện tử công suất và truyền động năm 2025-2026
9 trang
Câu hỏi ôn tập học phần Kỹ thuật đo lường
3 trang
Bài giảng Máy điện và truyền động điện: Chương 7 - ThS. Nguyễn Đình Sơn
76 trang
Bài giảng Máy điện và truyền động điện: Chương 6 - ThS. Nguyễn Đình Sơn
21 trang
Bài giảng Máy điện và truyền động điện: Chương 5 - ThS. Nguyễn Đình Sơn
29 trang
Bài giảng Máy điện và truyền động điện: Chương 4 - ThS. Nguyễn Đình Sơn
45 trang
Bài giảng Máy điện và truyền động điện: Chương 3 - ThS. Nguyễn Đình Sơn
29 trang
Bài giảng Máy điện và truyền động điện: Chương 2 - ThS. Nguyễn Đình Sơn
36 trang
Bài giảng Máy điện và truyền động điện: Chương 1 - ThS. Nguyễn Đình Sơn
19 trang
Đề cương ôn tập học phần Đo lường điện
5 trangAI tóm tắt
- Giúp bạn nắm bắt nội dung tài liệu nhanh chóng!Giới thiệu tài liệu
Đối tượng sử dụng
Từ khoá chính
Nội dung tóm tắt
Giới thiệu
Về chúng tôi
Việc làm
Quảng cáo
Liên hệ
Chính sách
Thoả thuận sử dụng
Chính sách bảo mật
Chính sách hoàn tiền
DMCA
Hỗ trợ
Hướng dẫn sử dụng
Đăng ký tài khoản VIP
Zalo/Tel:093 303 0098
Email:[email protected]
Phương thức thanh toán
Theo dõi chúng tôi
Youtube
TikTok
 Chịu trách nhiệm nội dung: Nguyễn Công Hà Doanh nghiệp quản lý: Công ty TNHH Tài Liệu trực tuyến Vi Na - GCN ĐKDN: 0307893603 Địa chỉ: 54A Nơ Trang Long, P. Bình Thạnh, TP.HCM - Điện thoại: 0283 5102 888 - Email: [email protected]ấy phép Mạng Xã Hội số: 670/GP-BTTTT cấp ngày 30/11/2015
Chịu trách nhiệm nội dung: Nguyễn Công Hà Doanh nghiệp quản lý: Công ty TNHH Tài Liệu trực tuyến Vi Na - GCN ĐKDN: 0307893603 Địa chỉ: 54A Nơ Trang Long, P. Bình Thạnh, TP.HCM - Điện thoại: 0283 5102 888 - Email: [email protected]ấy phép Mạng Xã Hội số: 670/GP-BTTTT cấp ngày 30/11/2015 Từ khóa » Bài Tập Ltđktđ
-
Bài Tập Lý Thuyết điều Khiển Tự động - 123doc
-
BÀI TẬP LỚN: LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG - Tài Liệu - 123doc
-
Bài Tập Lý Thuyết điều Khiển Tự động - Dien Tu Viet Nam
-
Bài Tập Dài - Lý Thuyết điều Khiển Tự động - Tailieunhanh
-
Bài Tập Lý Thuyết điều Khiển Tự đông Có Lời Giải?
-
Tài Liệu Bài Tập Dài - Lý Thuyết điều Khiển Tự động
-
Bài Tập điều Kiện Lý Thuyết điều Khiển Tự động
-
Tài Liệu Bài Tập điều Kiển Tự động, Nguyễn Thị Phương Hà - Xemtailieu
-
[PDF]Điều Khiển Tự Động - Giáo Trình, Bài Giảng, Bài Tập Lớn, đề Thi ...
-
[PDF] Bài Giảng LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG 2 GV
-
Ngân Hàng LTĐKTĐ (sinh Viên) Ko đáp án - StuDocu
-
Bài Tập Lớn LtĐktĐ-tong 1 - VDOCUMENTS
-
[DOC] Câu 1 Xác định Hàm Truyền Của Hệ Thống Có Sơ đồ Như Hình Vẽ :
-
Bài Giảng Lý Thuyết điều Khiển Tự động - Trường đại Học Bách Khoa