Bộ điều Khiển PID - ứng Dụng Phần 2 - Xe Dò Line Dùng Thuật Toán PID
Có thể bạn quan tâm
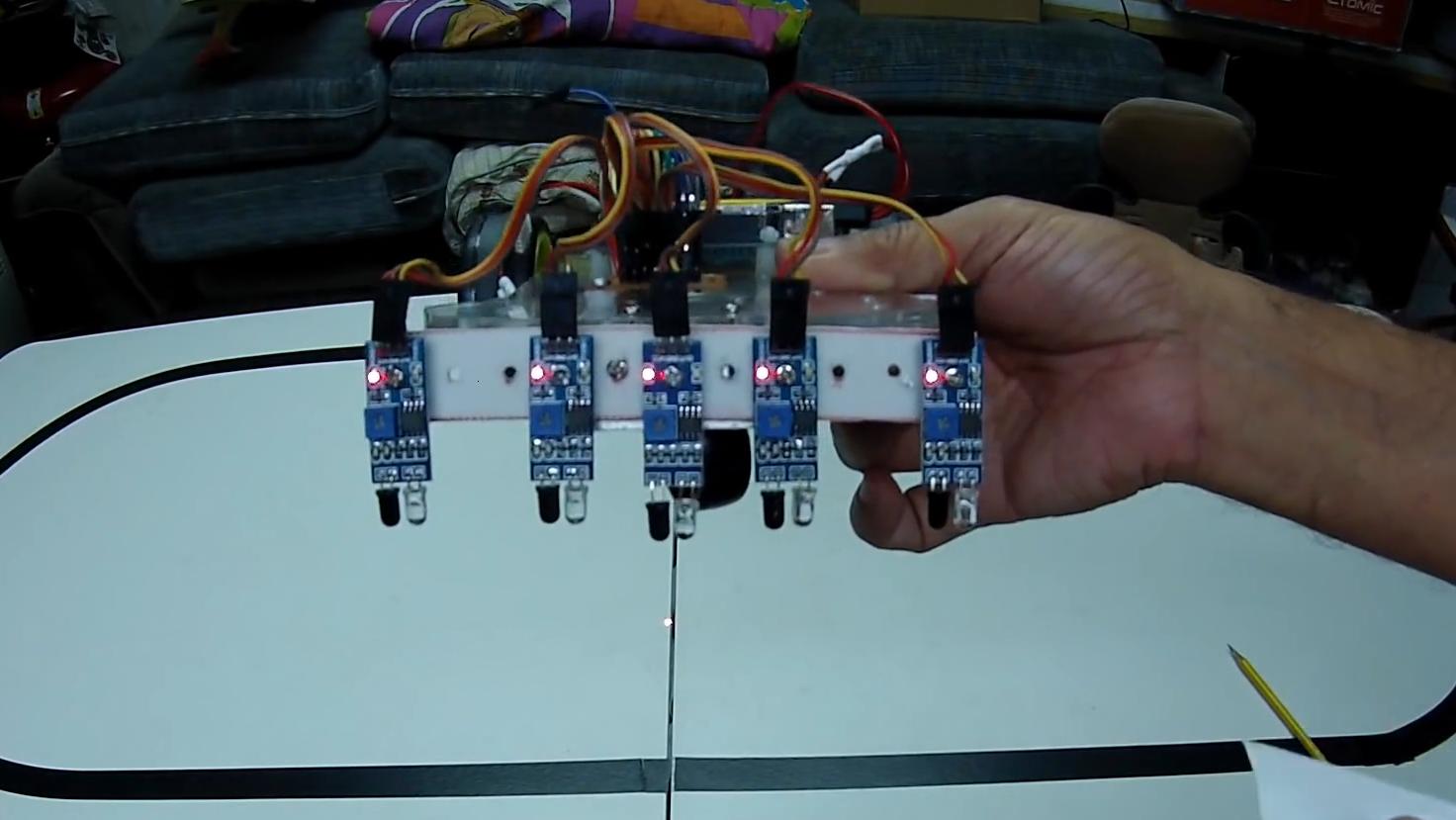
Các bạn chuẩn bị phần cứng như phần 4 có điều phải nối lại dây theo code sau mình không muốn nhắc đến phần cứng
Xây dựng chương trình và thuật toán
| Giá trị sensor | Vị trí của xe |
| 0 0 1 0 0 | chính giữa |
| 1 0 0 0 0 | bên phải line |
| 0 0 0 0 1 | bên trái line |
Như thế này nếu số 1 là giá trị khi nhận ra line thì số 1 càng dịch sang trái hoặc sang phải thì ta có 10 mức lệch line trong cả trường hợp có hai cảm biến cùng phát hiện ra line, khi đó chúng ta sẽ áp dụng PID để tính toán để đưa ra giá trị điều kiển PWM đến mạch cầu H
các giá trị khi lệch line
| Giá trị sensor | Giá trị tương ứng |
| 0 0 0 0 1 | 4 |
| 0 0 0 1 1 | 3 |
| 0 0 0 1 0 | 2 |
| 0 0 1 1 0 | 1 |
| 0 0 1 0 0 | 0 |
| 0 1 1 0 0 | -1 |
| 0 1 0 0 0 | -2 |
| 1 1 0 0 0 | -3 |
| 1 0 0 0 0 | -4 |
| 0 0 0 0 0 | -5 |
Lập trình để nhận và chuyển đổi giá trị
void read_sensor_values() { sensor[0]=digitalRead(A0); sensor[1]=digitalRead(A1); sensor[2]=digitalRead(A2); sensor[3]=digitalRead(A3); sensor[4]=digitalRead(A4); if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==0)&&(sensor[4]==0)&&(sensor[4]==1)) error=4; else if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==0)&&(sensor[4]==1)&&(sensor[4]==1)) error=3; else if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==0)&&(sensor[4]==1)&&(sensor[4]==0)) error=2; else if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==1)&&(sensor[4]==1)&&(sensor[4]==0)) error=1; else if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==1)&&(sensor[4]==0)&&(sensor[4]==0)) error=0; else if((sensor[0]==0)&&(sensor[1]==1)&&(sensor[2]==1)&&(sensor[4]==0)&&(sensor[4]==0)) error=-1; else if((sensor[0]==0)&&(sensor[1]==1)&&(sensor[2]==0)&&(sensor[4]==0)&&(sensor[4]==0)) error=-2; else if((sensor[0]==1)&&(sensor[1]==1)&&(sensor[2]==0)&&(sensor[4]==0)&&(sensor[4]==0)) error=-3; else if((sensor[0]==1)&&(sensor[1]==0)&&(sensor[2]==0)&&(sensor[4]==0)&&(sensor[4]==0)) error=-4; else if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==0)&&(sensor[4]==0)&&(sensor[4]==0)) if(error==-4) error=-5; else error=5; }Bây giờ là phần quan trọng áp dụng công thức PID ta có code để tính toán đưa ra giá trị điều kiển PWM ( mình tham khảo trên internet nha )
PID_value chính là biến để lưu giá trị điều kiển động cơ void calculate_pid() { P = error; I = I + error; D = error – previous_error; PID_value = (Kp*P) + (Ki*I) + (Kd*D); previous_error=error; } Khi đã có PID_value lúc này chúng ta biết xe đang lệch line như thế nào và cần giá trị nào để phù hợp nhất điều kiển xe đi đúng lineMotor control
void motor_control() { // Calculating the effective motor speed: int left_motor_speed = initial_motor_speed-PID_value; int right_motor_speed = initial_motor_speed+PID_value; // The motor speed should not exceed the max PWM value constrain(left_motor_speed,0,255); constrain(right_motor_speed,0,255); analogWrite(9,left_motor_speed); //Left Motor Speed analogWrite(10,right_motor_speed); //Right Motor Speed //following lines of code are to make the bot move forward /*The pin numbers and high, low values might be different depending on your connections */ digitalWrite(4,HIGH); digitalWrite(5,LOW); digitalWrite(6,LOW); digitalWrite(7,HIGH); }Bây giời đến void loop
void loop() { read_sensor_values(); calculate_pid(); motor_control(); }và đây là hoạt động của xe
Từ khóa » Thư Viện Pid Arduino
-
Arduino PID Library - Arduino Playground
-
PID_v2 - Arduino Reference
-
P.I.D - SPEED & POSITION CONTROL | Cộng đồng Arduino Việt Nam
-
Thư Viện Arduino Tinh Chỉnh Tham Số PID - Arduino PID Autotune ...
-
PID - Arduino Library List
-
Arduino-PID-Library/PID_v1.h At Master - GitHub
-
Hướng Dẫn Thêm Mới Thư Viện Trong Arduino IDE (Cập Nhật 2022)
-
ARDUINO CHO NGƯỜI MỚI BẮT ĐẦU (Quyển Không Còn Là Căn Bản)
-
Tổng Hợp Tất Cả Thư Viện Arduino
-
Code Mẫu, điều Khiển Motor Bằng PID - NgLeY
-
Giải Thích đoạn Code điều Khiển động Cơ DC Sử Dụng PID Giúp Mình ...
-
Tổng Hợp Các Thư Viện Cho Arduino IDE - Điện Tử Việt