Cánh Tay Robot 4 Bậc Tự Do - Điều Khiển Bằng Máy Tính Dùng LABVIEW
Có thể bạn quan tâm
I.Giới thiệu
Thông qua các phương tiện thông tin trên các diễn đàn Internet và các trung tâm học tập thực hành, cho thấy nhu cầu học tập và nghiên cứu cũng như tự mày mò tìm hiểu về nhiều lĩnh vực trong ngành điện điện tử nói chung và ngành tự động hóa nói riêng là rất cao. Hiện nay trong các nhà máy có các dây chuyền sản xuất, có rất nhiều các tay máy hoạt động. Robot công nghiệp đã có mặt trong sản xuất từ nhiều năm trước, ngày nay robot công nghiệp được dùng ở nhiều lĩnh vực sản xuất. đó là xuất phát từ những ưu điểm mà robot đó đã được chọn và đúc kêt lại trong quá trình sản xuất, robot có những tính năng mà con người không thể có được, khả năng làm việc ổn định,làm việc trong môi trường độc hại. Do đó việc đầu tư nghiên cứu, chế tạo ra những loại robot phục vụ cho công cuộc tự động hóa sản xuất là rất cần thiết cho hiện tại và trong tương lai.
Tác giả Lê Quang Đức Phạm Tấn Tín
II. Hoạt động

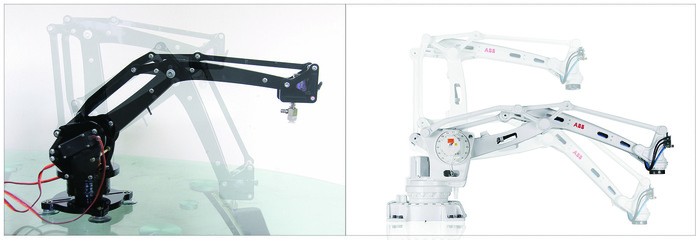
Ngày 13/03/2012 ABB Robotics cho ra mắt PalletPack 460, gói tiền chế cuả các thành phần robot bốc xếp với robot IRB 460 được thiết kế đặc biệt cho chức năng bốc xếp đầu cuối dòng tốc độ cao. Tâm điểm của PalletPack là IRB 460, robot bốc xếp nhanh nhất được biết đến trên thị trường. IRB 460 bốn trục có tầm với 2.4 mét và công xuất nâng 110 kg, thiết kế nhỏ gọn khiến nó trở thành sản phẩm lý tưởng cho việc tích hợp vào các dây chuyển đóng gói sẵn có.
Robot tọa độ cầu 4 bậc của mình mô phỏng theo robot công nghiệp IRB 460 của hãng ABB , đã được thu nhỏ lại với 2 cánh tay đòn dài 160 mm, nặng khoảng 2kg và có thể nâng vật khoảng 250g.
Mô Phỏng hoạt động
Các khâu của robot thường thực hiện hai chuyển động cơ bản:
Chuyển động tịnh tiến theo hướng x,y,z trong không gian Descarde (Đề cát - không gian 3D), thông thường tạo nên các hình khối, các chuyển động nầy thường ký hiệu là T (Translation) hoặc P (Prismatic).
III. Nào cùng làm
1. Khung Robot
- Chuẩn bị 2 tấm mica Đài Loan (chỉ có loại này mới cắt laze được) màu sắc tùy ý có kích thước như sau:
- Tấm 5 ly: 250mmx650mm (100k) để cắt tấm này.
- Tấm 3 ly: 250mmx250mm (50k) để cắt tấm này.
- Bạc đạn :
- MF84ZZ 20 cái (8k/1 cái)
- 61807 1 cái (30k/1 cái)
Ra chợ Tạ Uyên mua. Mình mua ở Tiệm 'Nam Bạc Đạn"
- Tán và Ốc (nên mua inox Sus 304 đỡ bị rỉ xét)
- Loại 3 ly và 5 ly dài 5mm, 10mm, 15mm, 20mm mỗi thứ 10 con thiếu chạy mua thêm.
- Trục
- Phi 10 ly dài 5 ly 1 cái
- Phi 7 ly lỗ trong 3 ly 2 cái
- Trụ Đồng
- Loại 3ly dài 65mm 1 cái
- Loại 3ly dài 15mm 1 cái
- Loại 3ly dài 20mm 4 cái
- Loại 3ly dài 10mm 3 cái
- Servo MG996R 3 cái (mua 2 cái hàng thật +1 cái hàng fake). Mua 3 cái thật mất công kiếm 1 cái part hàng giả cực lắm. ( 520k)
- Lưu ý: khi mua MG996R người ta có tặng kèm part nhớ kiểm tra coi có part tròn không nhé! Không có thì ăn hành luôn.

- Lưu ý: khi mua MG996R người ta có tặng kèm part nhớ kiểm tra coi có part tròn không nhé! Không có thì ăn hành luôn.
- Micro Servo 9G 2 cái (110k)
- Arduino đương nhiên rồi (UNO, MEGA)
- LM2596 modul có led 7 đoạn hiện thị điện áp đỡ mất công phải đo tới đo lui.
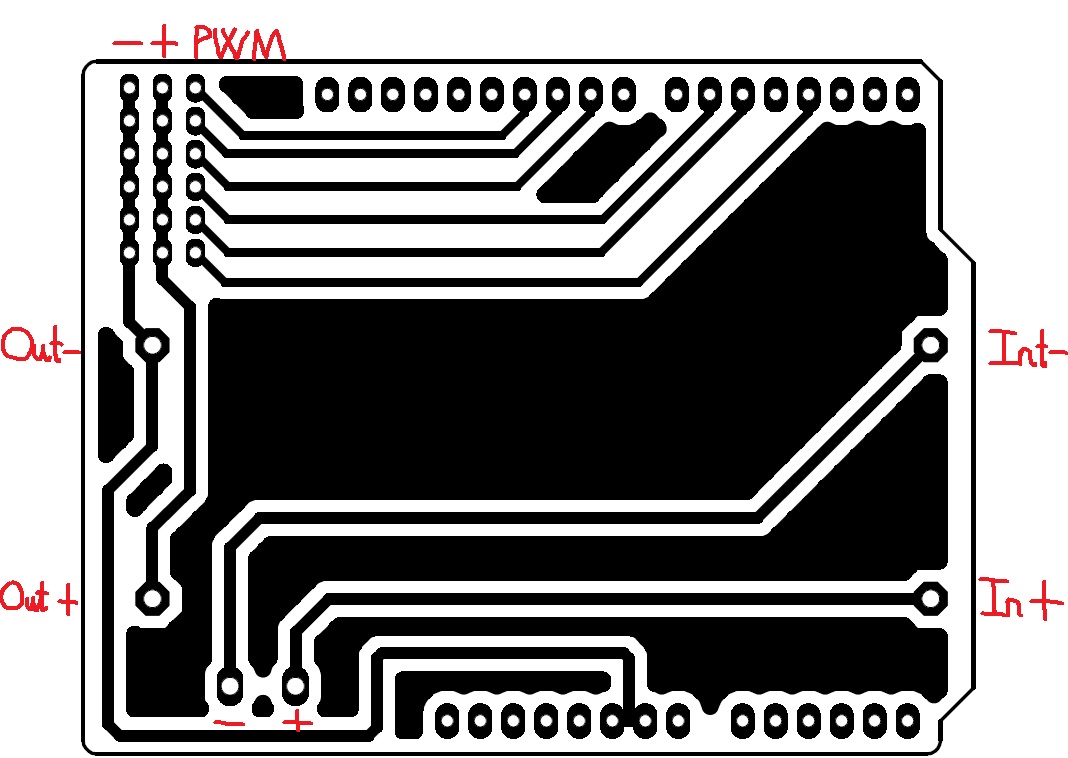
- Shield mình vẽ đính kèm xuất PDF sẵn rồi, ủi ra rồi gắn lên SHIELD, bạn nào thích gắm dây qua breadboard cũng được.
2. Hướng dẫn lắp ghép
Trong LINK DOWLOAD (xem mục lục phải) có file 3D các bạn down về xem cho rõ.
3. Lập trình
- Tải về và cài đặt Arduino IDE phiên bản mới nhất tại đây: http://arduino.vn/download
- Tải về cài đặt LabView 2014: http://sotechvn.blogspot.com/2015/09/labview-2014-full-crack-huong-dan.html
- Tải về cài đặt VI Package Manager mới nhất tại đây: http://jki.net/vipm
Cài đặt như sau
Để kết nối và làm việc với Arduino, trên LabVIEW cần có 1 bộ VIs của Arduino. Thông qua bộ VIs, LabVIEW có thể lấy dữ liệu từ các chân Arduino và xử lý, điều khiển hoặc hiển thị kết quả trên màn hình máy tính. Do sự phổ biến và chuẩn hóa của Arduino nên bộ VIs của nó đã được phổ biến rộng rãi không cần người sử dụng phải tự lập trình. Để sử dụng được ta thực hiện theo các bước sau:
- Bước 1: Cài đặt VI Package Manager (VIPM) – đây là phần mềm quản lý cũng như giúp chúng ta download các gói VI của LabVIEW.
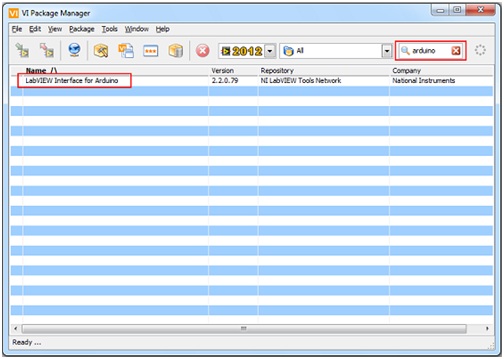
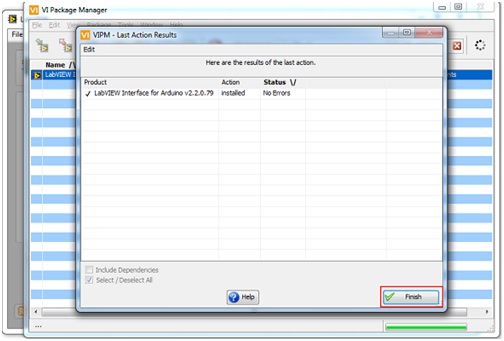
- Bước 2: Sau khi cài đặt xong ta vào VIPM và tìm giao diện Arduino cho LabVIEW với từ khóa “LabVIEW Interface for Arduino” . Sau đó cài đặt LabVIEW Interface for Arduino cho LabVIEW, lưu ý là phải đúng phiên bản của LabVIEW
- Bước 3: Kết nối Arduino với máy tính qua cổng USB.
- Bước 4: Nạp mã nguồn cho Arduino để có thể giao tiếp với LabVIEW.
-
- Tìm đến <LabVIEW> là nơi chứa thư mục LabVIEW sau khi cài đặt.Ví dụ: cài LabVIEW tại ổ C thì <LabVIEW> sẽ tương ứng với: C:\Program Files\NationalInstruments\LabVIEW 20XX.
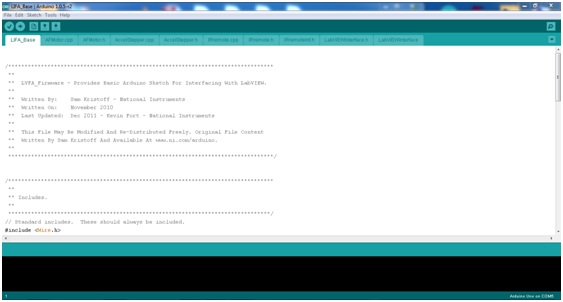
- Chọn vi.lib\LabVIEW interface for Arduino\Firmware Kích đúp vào LIFA_Base. Trình dịch IDE Arduino tự hiện thị
- Chọn đúng Board và Serial Port sau đó kích vào Upload để nạp vào Arduino. Khi có thông báo Done uploading là đã nạp thành công và đã có thể làm việc với Arduino trên LabVIEW.
- Ta có thể thấy khối Init có rất nhiều chân ra song để thiết lập cho việc kết nối ta chỉ quan tâm tới một vài chân.Cụ thể là: - Chân VISA resource là chân thiết lập cổng COM để giao tiếp giữa LabVIEW và Arduino.
- Chân Baud Rate là chân thiết lập tốc độ baud.Tốc độ baud là 115200 đối với Arduino Uno, là 9600 đối với các dòng Arduino khác.
- Chân Board Type là chân để chọn loại Arduino để làm việc.Có 3 loại Arduino được hỗ trợ là: Uno,Mega 2560 và Dimuelanove/Atmega 328.
- Chân Connection Type là chân lựa chọn kiểu kết nối: qua USB,XBEE hoặc Bluetooth. - Chân Arduino Resource để kết nối với các khối khác. Cách thiết lập chân và một số lưu ý nhỏ khi nối các khối
- Một khối được chia làm 2 dãy chân dữ liệu. Các chân nằm bên trái của khối là các chân đưa dữ liệu vào hoặc là các thiết lập ban đầu của tín hiệu.Các chân bên phải là các chân đưa dữ liệu ra hoặc các thành phần của tín hiệu đã tách được khi qua khối.
- Để thiết lập bất kỳ chân nào của một khối ta làm như sau: + Đưa con trỏ chuột tới chân cần thiết lập sao cho con trỏ chuột trở thành Wiring tool (hoặc có thể dùng Tool Palette).
- Click Chuột phải, sau đó trỏ chuột vào Create chọn kiểu thiết lập.Có 3 kiểu thiết lập: Constant(hằng số), Control(điều khiển), Indicator(hiển thị) tùy vào mục đích để lựa chọn phù hợp.
- Chân Arduino Resource của khối này nối với chân Arduino Resource của khối khác.
- Chân error out của khối trước thì nối với error in của khối liền sau.
- Đối với các khối còn lại ta cũng thiết lập tương tự.
LINK DOWLOAD
https://drive.google.com/drive/folders/0BxLzNXOK7POaNWRmZDVkNEVoaVk (mirror)
Chọn thư mục robot click phải chuột chọn tải xuống nhé !!!
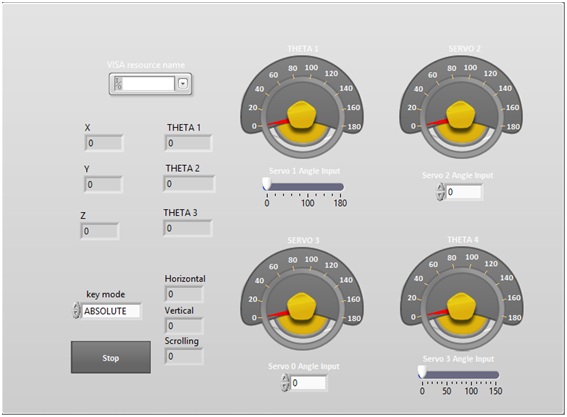
Font Panel Điều Khiển:
GCODE:
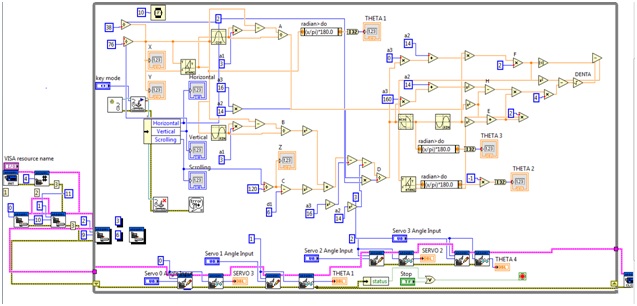
Bạn có thể xem động học(Kinematics robotics) trong file báo cáo.
Xong hết rồi thì chiến thôi:
IV. Kết luận
Ưu điểm
Cánh tay được thiết kế khá đẹp mắt, nhỏ gọn phù hợp với đề tài đồ án cơ sở.
Nhược điểm
- Vì đây là robot mô phỏng lại nên nó không thể nâng được vật nặng như robot thực trong công nghiệp, cũng như không thể điều khiển chính xác được .
- Động cơ servo là bộ phận dễ bị hư nhất vì khi quay servo, thì cánh tay đòn của robot cũng quay theo, nếu không cân chỉnh thì có thể làm cho khâu này vạ chạm với khâu kia, làm cho bánh răng ở trong servo bị gãy răng, làm cho servo không thể tự giữ được nữa, buộc lòng chúng ta phải thay bánh răng mới hoặc phải mua lại động cơ servo ấy.
- Tốc độ hoạt động chưa nhanh, công suất thấp .
- Khớp tay kẹp hoạt động chậm hơn những khâu khác.
Dù đã cố gắn hết sức, nhưng vì thời gian làm đồ án có hạn nên phải dừng lại , việc điều khiển vẫn chưa được như ý muốn . Mình và những người thực hiện đồ án hi vọng, những khóa sau sẽ hoàn thiện nó , để nó có thể ứng dụng được.
Từ khóa » Cánh Tay Robot 4 Bậc Là Gì
-
Cánh Tay Robot 4 Bậc, Giải Pháp Cho Ngành Công Nghiệp Sản Xuất
-
4 Loại Cánh Tay Robot 4 Bậc được Sử Dụng Nhiều Nhất Hiện Nay
-
Cánh Tay Robot 4 Bậc Tự Do Dựa Trên Anfis Bằng Cách Sử Dụng Thị ...
-
Cánh Tay Robot 4 Trục RDG460 | Việt Machine
-
Thiết Kế Và Chế Tạo Cánh Tay Robot 4 Bậc Tự Do Phân Loại Sản Phẩm ...
-
Thiết Kế Robot 4 Bậc Tự Do - Tài Liệu Text - 123doc
-
Mô Hình Cánh Tay Robot 4 Bậc - Bản Vẽ CAD - Full Tài Liệu Miễn Phí
-
Sự Kỳ Diệu Của Cánh Tay Robot Công Nghiệp - CNCVINA
-
[PDF] THIẾT KẾ, CHẾ TẠO ROBOT 04 BẬC TỰ DO MÔ PHỎNG CHUYỂN ...
-
Cánh Tay Robot Là Gì ? Cánh Tay Robot Cộng Tác
-
Cánh Tay Robot 4 Bậc Tự Do - Websosanh
-
Đề Tài: Chế Tạo Và điều Khiển Cánh Tay Robot 3 Bậc Tự Do, HAY
-
Tất Tần Tật Về Cánh Tay Robot Gắp Sản Phẩm - Thiết Bị Giáo Dục STEM
-
Bộ Cánh Tay Robot 4 Bậc Arm 4DoF - Điều Khiển Qua Tay PS ...