Cấu Tạo Bên Trong Biến Tần, Nguyên Lý Sơ đồ Chi Tiết Mạch điện Biến ...
Có thể bạn quan tâm
Nội dung bài viêt
- I. TỔNG QUAN VỀ CẤU TẠO BÊN TRONG BIẾN TẦN
- 1. Các đặc tính dạng sóng:
- 2. Nguyên tắc hoạt động của bộ chỉnh lưu.
- 3. Nguyên tắc hoạt động bộ phận nghịch lưu.
- II. Các phương pháp điều khiển của biến tần
Với tiến bộ của công nghệ vi xử lý và công nghệ bán dẫn lực hiện nay, công nghệ của biến tần luôn thay đổi từng ngày và ngày càng nhiều chức năng hơn. Vậy cấu tạo bên trong biến tần như thế nào, nguyên lý làm việc cũng như sơ đồ mạch biến tần ra sao, hãy cùng Hoàng Gia tìm hiểu.
- Biến tần là gì ? Nguyên lý hoạt động ? Tại sao biến tần lại được sử dụng nhiều như vậy ?
- Biến tần có tác dụng gì ? Lợi ích mà biến tần mang lại trong sản xuất ?
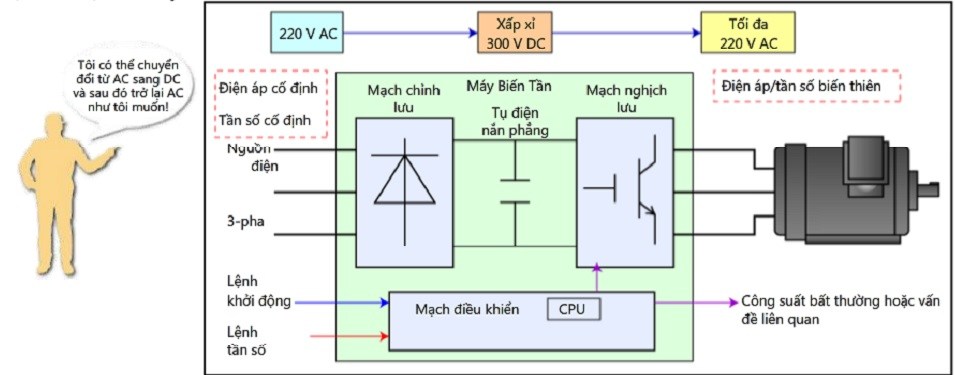
Biến tần được sử dụng để tạo ra tần số cài đặt linh hoạt từ một tần số cố định được cấp ra từ lưới điện như sơ đồ sau của biến tần 3 pha 220 VAC.
I. TỔNG QUAN VỀ CẤU TẠO BÊN TRONG BIẾN TẦN

Các bộ phận chính cấu tạo bên trong biến tần gồm :
- Mạch Chỉnh lưu: chuyển đổi AC thành DC, sử dụng bộ phận bán dẫn được biết đến với tên gọi Diot.
- Tụ điện nắn phẳng: Hoạt động để nắn phẳng điện áp DC đã được chuyển đổi qua mạch chỉnh lưu.
- Mạch Nghịch lưu: Được sử dụng để xuất ra điện áp AC từ điện áp DC. Thiết bị được gọi là bộ nghịch lưu này khác với bộ chỉnh lưu về tên gọi và chức năng. Được sử dụng đẻ cấp điện áp/tần số biến thiên được tạo ra cho động cơ. Sử dụng các bộ phận đóng cắt bán dẫn (IGBT và bộ phận tương tự) có thể bật và tắt.
- Mạch điều khiển: Kiểm soát điều khiển, cài đặt máy biến tần.
1. Các đặc tính dạng sóng:

Cách thay đổi đầu vào và đầu ra khi sử dụng máy biến tần?
- Dòng điện đầu vào: dạng sóng điện nhìn như tai thỏ (Bao gồm các thành phần có độ dốc cao).
- Dòng điện đầu ra: dạng sóng nhìn như một tập hợp cá đường thẳng (hình chữ nhật). Bao gồm các thành phần tần số cao và các thành phần xung điện áp.
Dạng sóng này được tạo ra từ các hoạt động bật tắc của các bộ phận bán dẫn trong máy biến tần
2. Nguyên tắc hoạt động của bộ chỉnh lưu.
a, Cách tạo ra điện áp DC từ lưới điện AC.
Hãy xem xét nguyên tắc này bằng cách sử dụng ví dụ đơn giản và điện áp AC 1 pha.
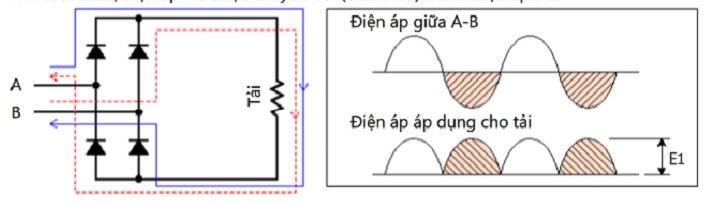
Để đơn giản cách giải thích chúng ta sử dụng điều khiển tải điện trờ cho ví dụ này:

Thành phần này được sử dụng như một đi ốt
Đi ốt chỉ cho phép dòng điện đi qua một chiều và không đi vào chiều kia theo hướng sử dụng điện áp.
Sử dụng đặc tính này khi điện áp AC được đưa vào A và B trong mạch chỉnh lưu, điện áp cũng đưa qua tải theo cùng hướng.
Nói cách khác điện áp AC được chuyển đổi (chỉnh lưu) thành điện áp DC.
b, Nguyên tắc hoạt động của bộ chỉnh lưu.
Đối vời đầu vào AC 3 pha, bộ nối 6 đi ốt được sử dung để chỉnh lưu sóng từ nguồn điện AC và tạo ra điện áp đầu ra như được thể hiện trong biểu đồ dưới đây.

c, Nguyên tắc hoạt động của mạch nắn phẳng.
Người ta dùng tụ điện để nắn phẳng điện áp đầu ra như sơ đồ sau:

d, Mạch giới hạn dòng điện nhảy vọt.

Các nguyên tắc phía sau máy chỉnh lưu được giải thích bằng tải điện trở nhưng trong các ứng dụng thực tế, một tụ điện nắn phẳng sẽ được sử dụng làm tải.
Dòng điện xung kích qua mạch, điện áp tức thời được dùng để nạp cho tụ điện.
Để ngăn đi ốt chỉnh lưu không bị hư hại do dòng điện xung kích, điện trở được đưa và trong mạch nối tiếp để chặn dòng điện xung kích trong thời gian ngắn sau khi nguồn điện được bật lên.
Do hoạt động theo mục đích này, điện trờ bị đoản mạch qua hai đầu nối của nó để sản sinh ra một mạnh bỏ qua điện trờ.
Mạch này được nhắc đến là mạch giới hạn dòng điện xung kích.

Nếu mạch giới hạn dòng điện xung kích được sử dụng, giá trị đỉnh dòng điện có thể được giảm để ngăn mô đun bộ chỉnh lưu bị hư hại.
e, Dạng sóng dòng điện đầu vào có tải tụ điện.
Các nguyên tắc phía sau máy chỉnh lưu được giải thích bằng tải điện trở nhưng trong các ứng dụng thực tế, một tụ điện nắn phẳng sẽ được sử dụng làm tải.
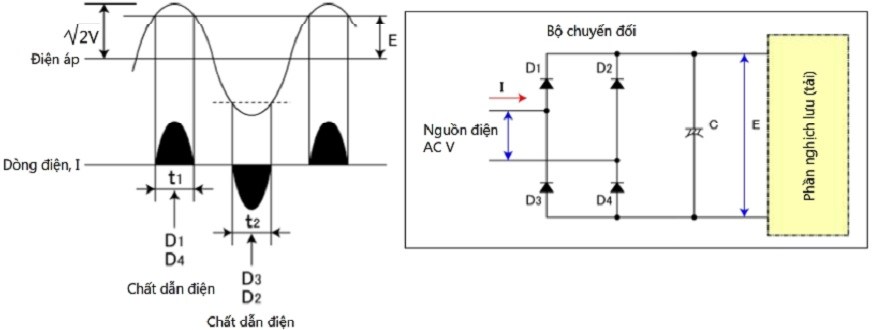
Dạng sóng dòng điện đầu vào trong trường hợp này chỉ xảy ra khi diện áp AC cao hơn điện áp DC. Điều này dẫn đến dạng sóng bị xoắn như trình bày trong biểu đồ và không phải sóng hình sin.
Như được mô tả ở các phần trên, bộ chỉnh lưu được tạo ra như sau:
3. Nguyên tắc hoạt động bộ phận nghịch lưu.
a, Cách biến đổi điện áp DC thành AC.
Hãy xem xét nguyên tắc này qua ví dụ đơn giản về điện áp AC 1 pha.
Mô tả ví dụ sau:
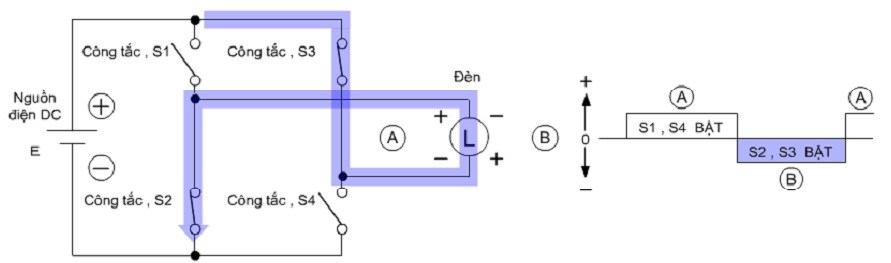
Bốn công tắc, S1 đến S4 được nối với nguồn điện áp DC, trong đó các công tắc S1 và S4 được ghé với nhau và các công tắc S2 và S3 cũng tương tự. Khi các cặp công tắc được bật, tắt, dòng điện đi qua đèn như trong biểu đồ dưới đây:
Dạng sóng dòng điện:
Khi các công tắc S1 và S4 được bật lên, dòng điện đi qua đèn theo hướng A.
Khi các công tắc S2 và S3 được bật lên, dòng điện đi qua đèn theo hướng B.
Nếu hoạt động của các công tắc này lặp lại theo một chu kỳ định sẵn, hướng đi của dòng điện sẽ thay đổi qua lại để tạo ra dòng điện xoay chiều.
b, Bạn có thể thay đổi tần số như thế nào ?
Tần số thay đổi khi bạn thay đổi khoảng thời gian BẬT và TẮT các công tắc S1 và S4.
Vú dụ, nếu bạn BẬT công tắc S1 và S4 trong 0,5 giây và sau đó BẬT công tắc S2 và S5 trông 0,5 giây liên tục qua lại thì bạn sẽ tạo ra một dòng điện xoay chiều ngược hướng dòng điện đó trong 1 giây, tương đương với tần số 1 Hz.

Nói cách khác, tần số được thay đổi khi thời gian t0 thay đổi.
c, Bạn có thể thay đổi điện áp bằng cách nào?

Điện áp (trung bình) có thể được thay đổi bằng cách thay đổi tỷ lệ thời gian BẬT/TẮT các công tắc bằng cách thay đổi thời gian chu kỳ t0, sang thời gian chu kỳ ngắn hơn để BẬT/TẮT điện áp.
Tần số cho các xung ngắn này được nhắc điến dưới dạng tần số sóng mang.
Ví dụ, nếu tỷ lệ thời gian BẬT/TẮT của các công tắc S1 và S4 bị giảm một nửa thì điện áp (trung bình) đầu ra trời thành điện áp AC tương đương với E/2, hoặc một nửa điện áp DC,E.
Để hạ thấp điện áp (trung bình), hãy hạ tỷ lệ thời gian BẬT và để nâng điện áp (trung bình) hãy nâng tỷ lệ thời gian BẬT.
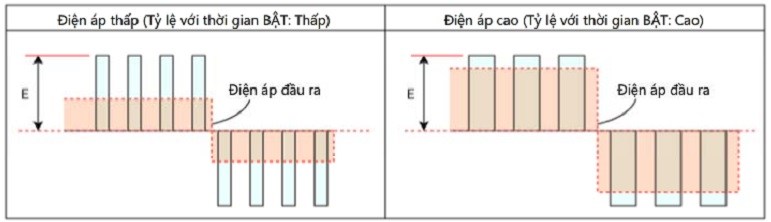
Độ rộng xung tỷ lệ BẬT/TẮT sẽ được điều khiển để thay đổi điện áp. Phương thức điều khiển dạng này được nhắc đến dưới dạng điều biến độ rộng xung (PWM) và hiện nay thường được sử dụng trong các máy biến tần và bộ phận điện tử khác.
d, Cách nghịch lưu với điện áp AC 3 pha?
Cấu tạo cơ bản của mạch biến tần 3 pha và điện áp AC 3 pha được trình bày dưới đây. Nếu bạn thay đổi thứ tự của sáu công tắc được BẬT/TẮT, kết quả sẽ thay đổi U-V, V-W và W-U. Cách này được sử dụng để thay đổi chiều quay của động cơ.
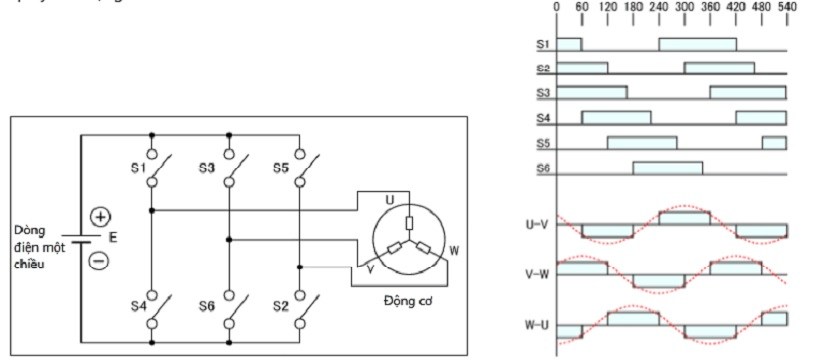
Lưu ý rằng trong thực tế các bộ phận bán dẫn được sử dụng thay cho các công tắc để biến đổi điện áp, cho phép các công tắc BẬT/TẮT ở tốc độ rất cao.
II. Các phương pháp điều khiển của biến tần
Máy biến tần đa năng duy nhất được dùng trong các lĩnh vực công nghiệp vào những năm 1980 là dạng máy biến tần điều khiển v/f.
Sau này, các phương pháp điều khiển Vector không cảm biến (tốc độ) được giới thiệu vào năm 1990 với mục đích tăng mô men xoắn trong phạm vi điều khiển tần số thấp hiệu quả hơn điều khiển V/F.
Công suất máy biến tần tăng lên đột ngột do các cải tiến và công nghệ phần cứng và công nghệ lý thuyết điều khiền bao gồm các chất bán dẫn.
Kiểm soát Vector bằng phản hồi tốc độ (Encoder) được áp dụng lần đầu đối với các động cơ vào năm 1990 đối với các lĩnh vực cần tối điều khiển tốc độ chính xác cao.
Các phương pháp điều khiển máy biến tần điển hình được nêu trong bảng dưới đây, chủ yếu là các phương pháp liên quan tới điều khiển tốc độ.
Theo nghĩa rộng, hãy nhớ rằng công suất và độ chính xác tăng lên khi bạn chuyển dần sang phía bên phải của bảng biểu ở dưới phương pháp điều khiển, tuy nhiên sự linh hoạt và hiệu quả kinh tế sẽ giảm xuống.
Đối với phương pháp điều khiển không dùng cảm biến tốc độ dưới đây là một trong các phương pháp được Mitsubishi Electric phát triển.
| Phương pháp điều khiển | Đặc tính V/F | Điều khiển Vector không dùng cảm biến | Điều khiển Vector dùng cảm biến | |
| Điều khiển theo từ thông | Điều khiển vector thực | |||
| Phạm vi điều khiển tốc độ | 1:10(6Hz đến 60Hz, Điện lưới) | 1:120(0.5Hz đến 60Hz, điện lưới) | 1:200(0.3Hz đến 60Hz, điện lưới) | 1:1500(1 vòng/phút đến 1500 vòng/phút, điện lới, máy phát) |
| Độ nhạy | 10 đến 20 (rad/s) | 20 đến 30 (rad/s) | 120 (rad/s) | 300 (rad/s) |
| Điều khiển tốc độ | Có | Có | Có | Có |
| Điều khiển momen xoắn | Không | Không | Có | Có |
| Điều khiển vị trí | Không | Không | Không | Có |
| Sơ lược | Với đa số các dạng phương pháp điều khiển máy biến tần phổ biến, điện áp và tần số được duy trì kiểm soát ở các giá trị không đổi | Để giải quyết vấn đề giả momen xoắn ở tốc độ thấp trong điều khiển V/F. phương pháp này được sử dụng nhằm điều chỉnh điện áp đầu ra bằng các phép tính vector cho dòng điện động cơ. | Ở các động cơ không có Encoder, hoạt động điều khiển đạt được thông qua việc tính điện áp/dòng điện và hằng số của động cơ. | Phương pháp này chia dòng điện động cơ thành các phần theo từ thông và các phần do momen xoắn tạo ta và sử điều khiển từng phần độc lập. Phương pháp này cho phép momen xoắn và vị trí được điều khiển ở độ chính xác cao và độ nhạy cao. |
| Đa năng | Phương pháp này cực kỳ linh hoạt đối với các động cơ tiêu chuẩn có ít bộ phận điều khiển | Phương pháp này cần một động cơ bất biến, tuy nhiên cấu tạo mạch tương đối đơn giản do có ít bộ phận điều khiển | Phương pháp này cần có một hằng số của động cơ và điều chỉnh độ lợi | Phương pháp này cần có một động cơ gắn encoder và điều khiển độ lợi |
| Động cơ có thể sử dụng | Động cơ thường | Động cơ thường | Động cơ thường | Động cơ có điều khiển vector chuyên dụng, gắn encoder phản hồi |
Hotline: 0919.343.368
Hãy Yêu cầu Báo giá sản phẩm ngay – Click vào đây để được Báo Giá Nhanh
Từ khóa » Sơ đồ Mạch Biến Tần
-
Sơ đồ Mạch điện Và Nguyên Lý Hoạt động Của Biến Tần
-
Sơ đồ đấu Dây Biến Tần INVT – CHI TIẾT
-
Biến Tần Là Gì? Sơ đồ Cấu Tạo Và Nguyên Lý Hoạt động Biến Tần?
-
Cấu Tạo Bên Trong Biến Tần, Nguyên Lý Sơ đồ Chi Tiết ... - Thevesta
-
Sơ đồ Khối Của Biến Tần - YouTube
-
Cấu Tạo Nguyên Lý Hoạt động Của Biến Tần
-
Sơ đồ Và Mạch điều Khiển Của Các Bộ Biến Tần Gián Tiếp - Tài Liệu Text
-
Tìm Hiểu Sơ đồ đấu Dây Biến Tần INVT Phần động Lực & Mạch điều ...
-
Sơ đồ Mạch Inverter Sin Chuẩn - Mobitool
-
Nguyên Lý, Cấu Tạo Hoạt động Của Biến Tần
-
Biến Tần Là Gì, Cấu Tạo Biến Tần, Lợi ích Của Biến Tần
-
Các Loại Biến Tần,Sơ đồ Mạch Và ứng Dụng
-
Cấu Tạo Và Nguyên Lý Hoạt động Của Biến Tần ( Công Nghệ Inverter)