Điều Chế độ Rộng Xung – Wikipedia Tiếng Việt
Có thể bạn quan tâm



Điều chế độ rộng xung sử dụng một sóng xung hình chữ nhật có độ rộng được điều chế dẫn đến sự biến thiên của giá trị trung bình của dạng sóng. Nếu chúng ta xem xét một sóng xung , với chu kỳ , giá trị thấp , giá trị cao và chu kỳ làm việc D (xem hình 1), giá trị trung bình của dạng sóng đó được cho bởi:



Vì là một sóng xung, giá trị của nó là trong khoảng và trong khoảng . Biểu thức trên trở thành:



Biểu thức sau này có thể khá đơn giản trong nhiều trường hợp trong đó khi . Từ đó, rõ ràng là giá trị trung bình của tín hiệu ( ) Là trực tiếp phụ thuộc vào chu kỳ làm việc D.




Cách đơn giản nhất để tạo ra một tín hiệu PWM là phương pháp giao thoa, chỉ yêu cầu cần có một sóng răng cưa hoặc sóng tam giác (dễ dàng tạo ra bằng cách sử dụng một bộ tạo dao động đơn giản) và một mạch so sánh. Khi giá trị của tín hiệu tham chiếu (tín hiệu đặt) (sóng sin màu đỏ trong hình 2) lớn hơn sóng điều biến (màu xanh lam), thì tín hiệu PWM (màu đỏ tía) sẽ ở trạng thái cao, nếu không thì ở trạng thái thấp.
Delta
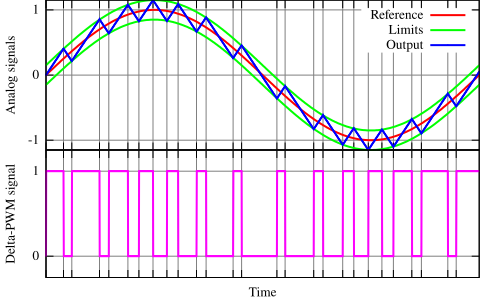
sửaTrong việc sử dụng điều chế delta cho điều khiển PWM, tín hiệu đầu ra được tích phân, và kết quả được so sánh với các giới hạn, tương ứng với một tín hiệu tham chiếu bù đắp bởi một hằng số. Mỗi lần tích phân của tín hiệu đầu ra đạt đến một trong những giới hạn này, tín hiệu PWM sẽ thay đổi trạng thái. Xem hình 3
Delta-sigma
sửaTrong phương pháp điều khiển PWM sử dụng điều chế delta-sigma, tín hiệu đầu ra được trừ đi bởi một tín hiệu tham chiếu để tạo thành một tín hiệu sai số. Sai số này được tích phân, và khi tích phân của sai số này vượt quá các giới hạn, đầu ra sẽ thay đổi trạng thái. Xem hình 4

Điều chế vector không gian
sửaĐiều chế vector không gian là một thuật toán điều khiển PWM cho việc tạo ra AC nhiều pha, trong đó các tín hiệu tham khảo được lấy mẫu thường xuyên; Sau mỗi mẫu, các vectơ chuyển mạch hoạt động khác-không nằm cạnh vectơ tham chiếu và một hoặc nhiều hơn các vectơ-chuyển-mạch-không được chọn cho một khoảng thời gian lấy mẫu thích hợp để tổng hợp tín hiệu tham chiếu như mức trung bình của các vectơ đã sử dụng.
Điều khiển mômen xoắn trực tiếp (DTC)
sửaĐiều khiển mô-men xoắn trực tiếp là một phương pháp đã được sử dụng để điều khiển động cơ AC. Nó liên quan chặt chẽ với điều chế delta (xem ở trên). Mômen xoắn của động cơ và từ thông được ước lượng và được kiểm soát để nằm trong dải trễ của chúng bằng cách điều chỉnh sự kết hợp mới của thiết bị chuyển mạch bán dẫn của thiết bị mỗi khi một trong hai tín hiệu này đi chệch ra khỏi dải trễ.
Tỷ lệ thời gian
sửaNhiều mạch kỹ thuật số có thể tạo ra tín hiệu PWM (ví dụ, nhiều vi điều khiển có đầu ra PWM). Chúng thường sử dụng một bộ đếm tăng dần theo chu kỳ (được kết nối trực tiếp hoặc gián tiếp với đồng hồ của mạch đó) và được reset vào cuối mỗi chu kỳ PWM. Khi giá trị bộ đếm nhiều hơn giá trị tham chiếu, đầu ra PWM sẽ thay đổi trạng thái từ cao xuống thấp (hoặc thấp lên cao).[3] Kỹ thuật này được gọi là tỉ-lệ-thời-gian, đặc biệt là điều khiển tỷ lệ-thời gian[4] – Trong đó tỷ lệ của một chu kỳ thời gian cố định là ở trạng thái cao.
Bộ đếm gia tăng và reset định kỳ là phiên bản rời rạc của răng cưa của phương pháp giao thoa. Mạch so sánh tương tự của phương pháp giao thoa trở thành một so sánh số nguyên đơn giản giữa giá trị hiện tại của bộ đếm và giá trị tham chiếu số (có thể được số hóa). Chu kỳ làm việc chỉ có thể được thay đổi theo các bước rời rạc, như là một hàm của độ phân giải bộ đếm. Tuy nhiên, một bộ đếm có độ phân giải cao có thể cho hiệu suất khá tốt.
Các loại PWM
sửa
Có ba loại điều chế độ rộng xung (PWM) đó là:
- Trung tâm xung có thể được cố định ở trung tâm của cửa sổ thời gian và cả hai cạnh của xung được di chuyển để nén hoặc dãn độ rộng.
- Cạnh đầu có thể được giữ ở cạnh chì của cửa sổ và cạnh đuôi được điều chế.
- Cạnh đuôi có thể được cố định và cạnh trước được điều chế.
Đồ thị
sửaĐồ thị thu được (trong ba trường hợp) là tương đương nhau, và mỗi trường hợp đều có thành phần DC - một dải cơ sở bao gồm tín hiệu điều biến và các sóng mang điều biến pha tại mỗi tần số hài của sóng xung. Biên độ của các nhóm hài bị giới hạn bởi một vành bao (hàm sinc) Và mở rộng đến vô cực. Băng thông vô hạn là do hoạt động phi tuyến của modulator độ rộng xung. Do đó, PWM kỹ thuật số bị bóp méo răng cưa, làm giảm đáng kể khả năng áp dụng cho hệ thống truyền thông hiện đại. Bằng cách hạn chế băng thông của nhân PWM, ta có thể tránh được các hiệu ứng răng cưa này.[5]

Ngược lại, điều chế delta là một quá trình ngẫu nhiên tạo ra phổ (đồ thị) liên tục mà không có sóng hài riêng biệt nào cả.
Định lý lấy mẫu PWM
sửaQuá trình chuyển đổi PWM là phi tuyến và người ta thường được cho là phục hồi tín hiệu qua bộ lọc thông thấp là không hoàn hảo cho PWM. Định lý lấy mẫu PWM [6] cho thấy rằng chuyển đổi PWM có thể là hoàn hảo. Định lý này được phát biểu rằng "Bất kỳ tín hiệu dãi cơ sở nào nằm trong ± 0,637 cũng có thể được biểu diễn bằng một dạng sóng điều rộng xung (PWM) với biên độ đơn vị. Số xung trong dạng sóng bằng với số lượng mẫu Nyquist và giới hạn đỉnh không phụ thuộc vào việc dạng sóng là hai-cấp hay ba-cấp."
• Định lý lấy mẫu Nyquist-Shannon:[7] "Nếu bạn có một tín hiệu là hoàn hảo về băng tần giới hạn đến băng thông thì bạn có thể thu thập tất cả các thông tin có trong tín hiệu đó bằng cách lấy mẫu nó ở những thời điểm rời rạc, miễn là tốc độ lấy mẫu của bạn lớn hơn ".


Từ khóa » Băm Xung Pwm Là Gì
-
Phương Pháp điều Xung PWM Là Gì?
-
Băm Xung (Pwm) Là Gì
-
PWM Là Gì? Cách điều Chế độ Rộng Xung | UNIDUC
-
Băm Xung Là Gì
-
Xung PWM | Cộng đồng Arduino Việt Nam
-
Băm Xung (Pwm) Là Gì
-
Băm Xung (Pwm) Là Gì - TruongGiaThien
-
(Mới 2022) PWM Là Gì? Nguyên Lý Hoạt động PWM - Mecsu Blog
-
Điện Tử Cơ Bản #40 PWM Là Gì ? Điều Chế độ Rộng Xung Và ứng ...
-
Xung PWM Là Gì? Giải Thích Nguyên Lý điều Khiển Pwm
-
Băm Xung (PWM) Là Gì | PDF - Scribd
-
Băm Xung Là Gì Cũng Như Mạch Băm Xung Là Gì - Oanhthai
-
Băm Xung Là Gì - Phương Pháp Điều Xung Pwm Là Gì
-
Xung PWM Và PPM Trong Arduino - Điện Tử Hello