Đo GNSS Tĩnh Là Gì | THC
Có thể bạn quan tâm
Với sự phát triển của khoa học công nghệ, đặc biệt là sự ra đời của công nghệ GPS, công tác trắc địa đã có những phát triển vượt bậc, giúp công tác đo đạc trở nên đơn giản thuận tiện hơn mà vẫn đảm bảo độ chính xác cao nhất. Khi nhắc tới công nghệ đo GPS, không thể bỏ qua công nghệ đo GNSS tĩnh. Vậy công nghệ đo GNSS tĩnh là gì, nguyên lý hoạt động của công nghệ này như thế nào. Qua bài viết này THC sẽ cùng các bạn làm rõ vấn đề này.
1. Công nghệ đo GNSS tĩnh là gì?
GNSS là tên viết tắt của Global Navigation Satellite System – hệ thống vệ tinh định vị toàn cầu. GNSS được cấu thành như một chòm sao (một nhóm hay một hệ thống) của quỹ đạo vệ tinh kết hợp với thiết bị ở mặt đất. Trong cùng một thời điểm, ở một vị trí trên mặt đất nếu xác định được khoảng cách đến ba vệ tinh (tối thiểu) thì sẽ tính được tọa độ của vị trí đó. GNSS hoạt động trong mọi điều kiện thời tiết, mọi nơi trên trái đất và 24 giờ một ngày. Mỹ là nước đầu tiên phóng lên và đưa vào sử dụng hệ vệ tinh dẫn đường này. Mỹ đặt tên cho hệ thống này là hệ thống vệ tinh định vị toàn cầu GPS (Global Positioning System), ban đầu là để dùng riêng cho quân sự, về sau mở rộng ra sử dụng cho dân sự trên phạm vi toàn cầu, bất kể quốc tịch và miễn phí.
Công nghệ đo GNSS tĩnh (Static) là phương pháp định vị tương đối, sử dụng 2 hoặc nhiều máy thu tín hiệu vệ tinh GNSS đặt cố định trên 2 hoặc nhiều điểm cần đo để thu trị đo Code (Coarse/Acquisition Code) và trị đo Phase (Carrier phase) từ các vệ tinh trong khoảng thời gian đủ dài phục vụ cho việc lập lưới khống chế trắc địa.
2. Ứng dụng của công nghệ đo GNSS tĩnh
Ngày nay với sự phát triển ngày càng nhanh của các lĩnh vực kinh tế xã hội, xây dựng, các công trình yêu cầu độ chính xác cao… ứng dụng của công nghệ đo GNSS tĩnh ngày càng rộng rãi và cần thiết hơn.
Ứng dụng trong công tác xác định toạ độ mốc khống chế trong thi công xây dựng

Ứng dụng trong công tác xây dựng lưới khống chế các cấp hạng trong khảo sát địa hình, địa chính.
3. Các nguồn sai số ảnh hưởng tới kết quả đo GNSS tĩnh
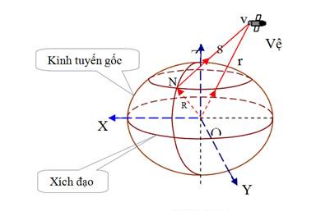
Như ta thấy, việc định vị bằng hệ thống GNSS về thực chất được xây dựng trên cơ sở giao hội khoảng cách từ các vệ tinh có toạ độ đã biết.
Khoảng cách từ vệ tinh đến điểm xét chỉ có thể được xác định theo thời gian và tốc độ lan truyền tín hiệu vô tuyến giữa chúng. Rõ ràng là kết quả xác định thời gian lan truyền tín hiệu sẽ chịu ảnh hưởng của sai số đồng hồ trên vệ tinh cũng như trong máy thu, còn tốc độ tín hiệu phụ thuộc vào môi trường lan truyền. Tiếp theo, vị trí của điểm xét chỉ có thể được xác định nếu ta biết toạ độ của các vệ tinh, do vậy độ chính xác của nó phụ thuộc vào sai số toạ độ của vệ tinh.
Một số loại sai số chủ yếu trong kết quả đo GPS như sau :
3.1. Sai số của đồng hồ
Đây là sai số của đồng hồ trên vệ tinh, đồng hồ trong máy thu và sự không đồng bộ giữa chúng.
Đồng hồ trên vệ tinh được trạm điều khiển trên mặt đất theo dõi, do đó nếu phát hiện có sai lệch, trạm này sẽ phát tín hiệu chỉ thị thông báo số cải chính cho máy thu GPS biết để xử lý. Để làm giảm ảnh hưởng sai số đồng hồ cả của vệ tinh và máy thu người ta sử dụng hiệu các trị đo giữa các vệ tinh cũng như giữa các trạm quan sát.
3.2. Sai số của quỹ đạo vệ tinh
Chuyển động của vệ tinh trên quỹ đạo không tuân thủ nghiêm ngặt định luật kepler do có nhiều tác động nhiễu như: Tính không đồng nhất của trọng trường trái đất, ảnh hưởng của sức hút Mặt trăng, Mặt trời và các thiên thể khác, sức cản của khí quyển, áp lực của của bức xạ Mặt trời,… Vị trí tức thời của vệ tinh chỉ có thể được xác định theo mô hình chuyển động được xây dựng trên cơ sở các số liệu quan sát từ các trạm có độ chính xác cao trên mặt đất thuộc thuộc đoạn điều khiển của hệ thống GPS, và đương nhiên có sai số.
Có hai loại ephemerit của vệ tinh : ephemerit được xác định từ kết quả hậu xử lý số liệu quan sát cho chính các thời điểm nằm trong khoảng thời gian quan sát và ephemerit được ngoại suy từ các ephemerit nêu trên cho mấy ngày tiếp theo. Loại ephemerit thứ nhất có độ chính xác ở mức 10 – 50m. và chỉ được cung cấp khi chính phủ Mỹ cho phép, còn loại thứ hai ở mức 20 – 100m và cho phép khách hàng đại trà sử dụng. Sai số vị trí của vệ tinh ảnh hưởng gần như trọn vẹn tới sai số xác định toạ độ của điểm quan sát đơn riêng biệt, nhưng lại được loại trừ đáng kể trong kết quả định vị tương đối giữa hai điểm.
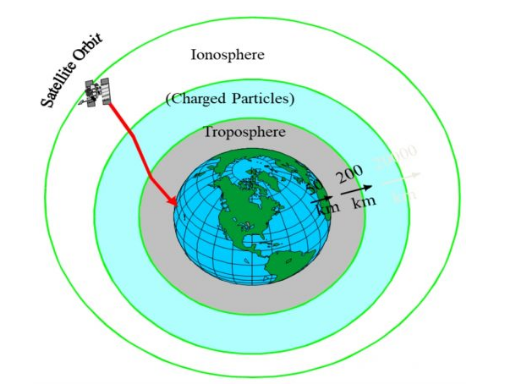
3.3. Sai số do tầng điện ly và tầng đối lưu.
Được phát đi từ vệ ở độ cao 20.200km xuống tới máy thu trên mặt đất, các tín hiệu vô tuyến phải xuyên qua tầng điện ly và tầng đối lưu. Tốc độ lan truyền tín hiệu tăng tỷ lệ thuận với mật độ điện tử tự do trong tầng điện ly và tỷ lệ nghịch với bình phương tần số của tín hiệu. Ảnh hưởng của tầng điện ly sẽ được loại trừ đáng kể bằng cách sử dụng hai tần số tải khác nhau. Chính vì thế, để đảm bảo định vị với độ chính xác cao, người ta sử dụng các máy thu GPS hai tần số. Song, khi hai điểm quan sát gần nhau thì ảnh hưởng nhiễu phản xạ do hai tần số kết hợp sẽ lớn hơn so với một tần số, do vậy nên sử dụng máy thu một tần số cho trường hợp định vị ở khoảng cách ngắn. Ảnh hưởng của tầng điện ly vào ban đêm sẽ nhỏ hơn tới 5 -6 lần so với ban ngày.
Ảnh hưởng của tầng đối lưu có thể được mô hình hoá theo các yếu tố khí tượng là : nhiệt độ, áp suất và độ ẩm. Nó có thể được xem là gần như nhau đối với hai điểm quan sát ở cách nhau không quá vài ba chục km, vì thế sẽ được loại trừ đáng kể trong hiệu trị đo giữa hai điểm quan sát.
Để làm giảm ảnh hưởng của tầng điện ly và tầng đối lưu người ta quy định chỉ quan sát vệ tinh ở độ cao từ 150km trở lên so với mặt phẳng chân trời.
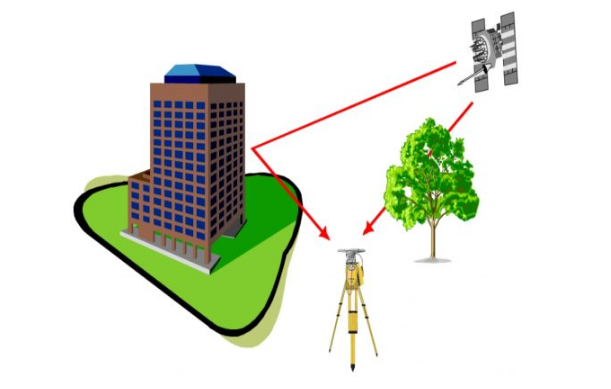
3.4. Sai số do nhiễu xạ của tín hiệu vệ tinh.
Ăng ten của máy thu không chỉ thu tín hiệu đi thẳng từ vệ tới, mà còn nhận cả các tín hiệu phản xạ từ mặt đất và môi trường xung quanh. Sai số do hiện tượng này gây ra được gọi là sai số do nhiễu phản xạ của tín hiệu vệ tinh. Để làm giảm sai số này, các nhà chế tạo máy thu không ngừng hoàn thiện cấu tạo của cả máy thu và ăng ten.
Tổng hợp ảnh hưởng các nguồn sai số chủ yếu nêu trên cùng các nguồn sai số phụ khác, khoảng cách từ vệ tinh đến điểm quan sát sẽ có sai số 13m với xác suất 95%. Nếu xét đến ảnh hưởng của chế độ SA thì sai số này sẽ là 50m. Song các giá trị này mới chỉ là sai số của khoảng cách từ mỗi vệ tinh.
4. Quy chuẩn về đo GNSS tĩnh
Hiện nay có rất nhiều thông tư, văn bản của Bộ Tài nguyên Môi trường về quy chuẩn đo GNSS tĩnh. Các văn bản này quy định riêng cho từng hạng mục, từng lĩnh vực ứng dụng của công nghệ đo GNSS tĩnh. Một số thông tư quy định có nhắc tới công tác đo GNSS tĩnh như:
Thông tư 68/2015/TT-BTNMT quy định kỹ thuật đo đạc trực tiêp địa hình phục vụ thành lập bản đồ địa hình và cơ sở dữ liệu nền địa lý tỉ lệ 1/500, 1/1000, 1/2000, 1/5000.
Tiêu chuẩn Việt Nam 9401:2012 kỹ thuật đo và xử lý số liệu GPS trong trắc địa công trình.
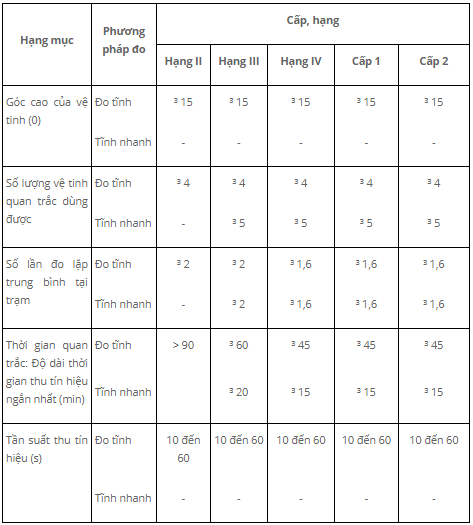
Một số quy định về đo GNSS tĩnh các cấp hạng như sau:
Nên sử dụng ít nhất ba máy thu GPS một tần số hoặc hai tần số có tham số độ chính xác a nhỏ hơn hoặc bằng 5 mm, b nhỏ hơn hoặc bằng 2 ppm và có định tâm quang học để đo lưới GPS.
Định tâm quang học của máy thu GPS cần được kiểm nghiệm trước khi sử dụng, bảo đảm sai số định tâm nhỏ hơn hoặc bằng ±1 mm.
Trước khi mở máy cho một ca đo phải đo chiều cao ăng ten bằng thước chuyên dùng đọc số đến 1 mm, ghi tên trạm máy, ngày tháng năm, số hiệu ca đo, chiều cao ăng ten. Sau khi tắt máy, tiến hành đo lại chiều cao ăng ten để kiểm tra, chênh lệch chiều cao ăng ten giữa hai lần đo không được vượt quá ±2 mm và lấy giá trị trung bình ghi vào số đo. Nếu như chênh lệch vượt quá hạn sai cho phép, thì phải tìm hiểu nguyên nhân, đề xuất ý kiến xử lý và ghi vào cột ghi chú trong sổ đo.
Tại mỗi trạm đo, các thông số được ghi chép lại gồm: Thời tiết, độ cao Anten, tình trạng làm việc của thiết bị, số lượng vệ tinh của từng máy đo thu được vào nhật ký hiện trường, sơ họa chi tiết cho từng mốc.
Tín hiệu vệ tinh tại mỗi điểm đo được ghi với tần suất 5 giây/1 lần ghi số liệu. Các số liệu được ghi vào bộ nhớ trong máy thu tạo thành các File đo riêng biệt cho từng máy, số liệu được trút vào máy tính cho từng section và từng ngày đo để xử lý.
Quá trình đo còn phải tuân theo hướng dẫn sử dụng máy, các tiêu chuẩn kỹ thuật tuân theo quy phạm và quy định sau:
PDOP 4.
Số vệ tinh tối thiểu là 5.
Góc ngưỡng vệ tinh > 15⁰.
Đo nhiệt độ, áp suất vào các thời điểm đầu, giữa, kết thúc đo; tính giá trị trung bình để nhập vào máy. Các thiết bị đo khí tượng phải để trong bóng râm và không quá xa với máy.
Bật máy GPS ít nhất 5 phút trước khi đo để máy định vị.
5. Các bước đo GNSS tĩnh.
Sau khi thực hiện xong công tác thiết kế đồ hình lưới GPS và tiến hành chôn mốc ngoài thực địa. Ta tiến hành công tác đo GNSS tĩnh để xác định toạ độ các vị trí, Các bước tiến hành đo GNSS tĩnh như sau:
5.1. Tổ chức đo
Thao tác trên các trạm đo:
Đặt máy lên điểm đo, định tâm và cân bằng máy chính xác. Cần đảm bảo sai số định tâm máy thu không quá 1mm.
Để khắc phục sai số lệch tâm pha ăng ten, khi đặt ăng ten trên giá máy ở các điểm trong lưới luôn luôn hướng mũi tên trên mặt ăng ten về hướng Bắc với sai số khoảng 50⁰. Sai số này mang tính hệ thống nên khi tính hiệu số toạ độ giữa các điểm sẽ được loại bỏ.
Đo chiều cao ăng ten 2 lần bằng thước thép với độ chính xác 1mm. Sau đó bật máy thu. Trong đo GNSS tĩnh hầu hết sử dụng chế độ đo tự động, do đó sự can thiệp của người đo gần như không cần thiết. Thường xuyên theo dõi tín hiệu đèn chỉ thị tình trạng hoạt động máy thu.
Ghi chép các số liệu vào sổ đo như tên điểm, người đo, chiều cao ăng ten, số hiệu máy…

5.2. Phân tích và xử lý số liệu
Khi tính cạnh, phải xem xét lịch vệ tinh tại thời điểm đo cạnh để có thể cắt bỏ chính xác vệ tinh xấu hay thời điểm máy thu không tốt, số vệ tinh tối thiểu để tính là 5 vệ tinh.
Các chỉ tiêu xử lý cạnh đạt được như sau:
Dài cạnh (km) | RMS | RDOP | RATIO | Ghi chú |
0 - 10 | 0.01+0.0040.D | < 0.1 | 3.31 | D là chiều dài cạnh tính bằng km |
Trong trường hợp một trong các chỉ tiêu vượt quá giá trị cho phép, nhưng không quá 1,5 lần thì xem xét kết quả tính sai số khép hình và bình sai sơ bộ để quyết định chấp nhận lời giải hay đo lại.
6. Một số phần mềm xử lý số liệu đo GNSS tĩnh
6.1. Compass solution
Compass solution là phần mềm bình sai của hãng Comnav với thao tác đơn giản, dễ sử dụng. Compass solution đang là phần mềm bình sai được nhiều người sử dụng.

6.2 TBC (Trimble Business Center)
TBC (Trimble Business Center) là một trong những phần mềm chuyên để xử lý các số liệu GPS một cách nhanh chóng và cho hiệu quả cao nhất.
7. Các bước xử lý số liệu đo GNSS tĩnh bằng phần mềm TBC (Trimble Business Center)
Xử lí số liệu đo GNSS tĩnh bằng phần mềm TBC gồm các bước sau:
7.1. Định nghĩa hệ quy chiếu
Khi xử lý số liệu GPS, người sử dụng cần xác định tọa độ điểm GPS trong hệ quy chiếu địa phương (Local). Hệ quy chiếu địa phương có thể là hệ quốc gia và cũng có thể là hệ tọa độ được lựa chọn phù hợp với công trình nào đó. Ở nước ta, hiện nay đang sử dụng hệ VN2000, trong một vài trường hợp, có thể định nghĩa hệ HN-72 tương ứng với Ellipsoid Krasovsky hoặc hệ Indian-54 ứng với Ellipsoid Everest. Cách thức thiết lập các hệ quy chiếu hoàn toàn giống nhau. Điểm khác biệt cơ bản là các tham số hình dạng kích thước Ellipsoid và các tham số tính chuyển tọa độ.
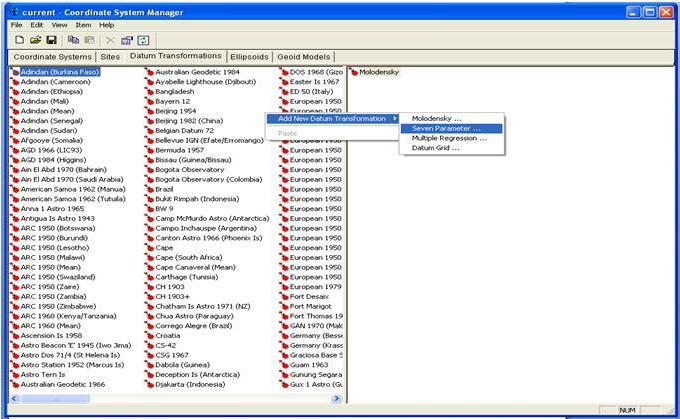
Các bước thiết lập được tiến ành từ Tools/Coordinate System Manager từ giao diện chính của phần mềm. Cửa sổ Coordinate System Manager xuất hiện và hiển thị tất cả các hệ tọa độ có trong file Current. Để thiết lập hệ tọa độ thực dụng VN2000, cần thực hiện các thao tác sau:
Chọn thẻ Datum Transformation, bấm chuột phải vào vùng trống bên trái và chọn Add New Datum Transformation/Seven Parameter… sẽ xuất hiện cửa sổ hình như sau:
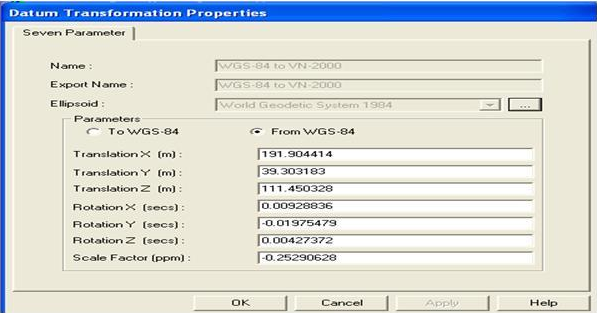
Trong cửa sổ Datum Transformation Properties nhập VN2000 vào trường Name. Nhấn vào mũi tên và chọn Ellipsoid: World Geodetic System 1984.
Nhập bảy tham số tính chuyển tọa độ từ hệ VN2000 sang hệ WGS-84 (To WGS-84) (xem thêm về kinh tuyến trục VN2000 các tỉnh) như trên hình 2, sau đó nhấn OK. Các tham số tính chuyển tọa độ từ hệ VN2000 sang hệ WGS-84 đã được Cục Đo đạc và Bản đồ Việt Nam công bố. Click OK để hoàn thành.
Định nghĩa hệ tọa độ vuông góc phẳng
Trong thực tế, chúng ta thường sử dụng hệ tọa độ vuông góc phẳng. Hiện nay, ở nước ta quy định sử dụng hệ tọa độ vuông góc phẳng theo phép chiếu hình trụ ngang giữ góc UTM hoặc . Để định nghĩa một hệ tọa độ UTM, chúng ta thực hiện các thao tác sau:
Trên cửa sổ Coordinate System Manager, chọn thẻ Coordinate Systems, bấm chuột phải vào khung trống bên trái và chọn Add New Coordinate Systems Group… khi đó xuất hiện cửa sổ như hình 3. Nhập tên cho nhóm hệ tọa độ trong cửa sổ Coordinate Systems Group Parameters và nhấn OK.
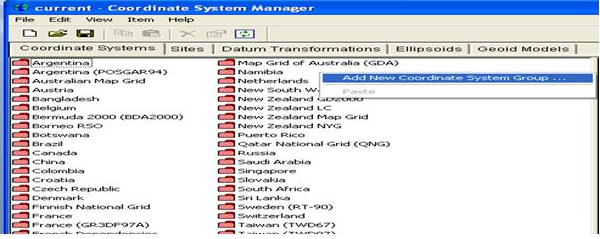
Dùng chuột chọn nhóm hệ tọa độ, các múi tọa độ hiện thời (nếu có) sẽ hiển thị ở phần màn hình bên phải. Trong hình 3.6, nhấn chuột phải chọn Add New Coodinate System/Transverse Mercator.. (là phép chiếu hình trụ ngang giữ góc)
Trong hộp thoại Geoid Model người dùng chọn một mô hình Geoid phù hợp (thông thường để mặc định EGM96 hoặc chọn mô hình EMG2008). Nhấn Next để tiếp tục.
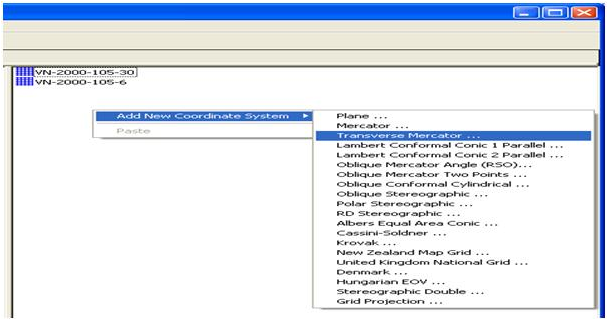
Tiếp theo, sẽ xuất hiện cửa sổ, trên đó ta ghi các tham số cho múi chiếu tọa độ vuông góc phẳng UTM gồm vĩ tuyến chuẩn (Central Latitude), kinh tuyến trục (Central Longitude), hằng số cộng vào tọa độ x (False Northing), hằng số cộng vào tọa độ y (False Easting) và tỷ lệ chiều dài trên kinh tuyến trục (Scale Factor), sau đó lại Next. Cuối cùng là nhấn Finish để hoàn tất công việc thiết lập một múi chiếu.
7.2. Tạo Project mới
Để tạo mới Project ta khởi động phần mềm TBC ta chọn File/New Project từ cửa sổ chính của phần mềm
Sau khi chọn, trên màn hình sẽ xuất hiện hộp thoại New Project. Trong trường hợp Template của nó chọn Metric để thiết lập các cấu hình Project metric đối với Project này và nhấn OK. Nếu muốn tùy chọn metric làm việc mặc định nhấn nút Set as default.
Thay đổi cấu hình project
Có thể xem và thay đổi tất cả các cấu hình của project bao gồm đơn vị (units), chi tiết về hệ tọa độ và các lựa chọn cho tính toán.
Để xem và thay đổi các cấu hình của project cần thực hiện:
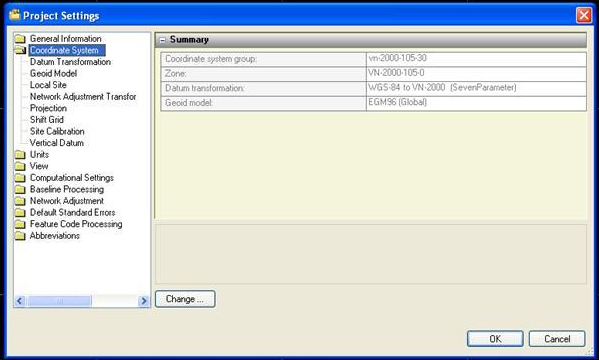
Chọn Project/Project Settings. Hộp thoại Project setting xuất hiện.
Để thay đổi các cấu hình hệ tọa độ cần chọn mục Coordinate System, khi đó thẻ Summary xuất hiện .
Tiếp theo sẽ thao tác trên các “phím” chức năng:
Nhấn Change. Hộp thoại Select Coordinate System sẽ xuất hiện.
Chọn New System và nhấn Next. Hộp thoại Select Coordinate System Type sẽ xuất hiện.
Chọn Coordinate System and Zone và nhấn Next. Hộp thoại Select Coordinate System Zone sẽ xuất hiện.
Trong Coordinate System Group, chọn hệ quy chiếu đã định nghĩa từ trước. Trong trường hợp Zone, chọn hệ tọa độ vuông góc phẳng (đã định nghĩa) đây là hệ VN-105-00 (kinh tuyến trung ương 105) và nhấn Next. Hộp thoại Select Geoid Model xuất hiện. Tiếp theo chọn mô hình Geoid và nhấn Finish.
7.3. Nhập dữ liệu cho công tác xử lý số liệu
Xử lý sau là công việc thường áp dụng để xử lý số liệu đo lưới GPS. Để xử lý sau, trước hết cần nhập dữ liệu từ lệnh Import. Có thể thực hiện bằng cách chọn File/Import hoặc biểu tượng Import trên thanh công cụ. Sau khi chọn, hộp thoại Import xuất hiện.
Trong danh sách Import Folder, sử dụng Browse, để tìm thư mục chứa bộ dữ liệu đã được trút vào máy tính. Việc trút số liệu từ bộ nhớ máy thu GPS vào máy tính phải được thực hiện trước bằng modun trút dữ liệu (thí dụ như modun Data Transfer…). Số liệu có thể ở dạng tệp DAT hoặc dạng RINEX. Chọn thư mục chứa số liệu trong đó có các tệp số liệu (DAT), chọn tất cả tệp và nhấn Import để nhập các tệp số liệu đó
Hộp thoại Importing File xuất hiện rất nhanh, hiển thị thông báo quá trình nhập dữ liệu.
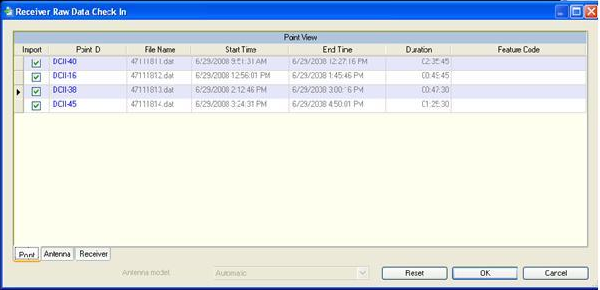
Sau khi nhập hết dữ liệu, hộp thoại Receiver Raw Data Check in sẽ xuất hiện.
Ngay sau khi nhập các tệp số liệu, các cờ sẽ xuất hiện trên sơ đồ lưới nếu sai số vị trí vượt ngưỡng về dung sai mặt bằng. Để xem danh sách các cờ, có thể chọn View/Flags Pane. Có thể thay đổi dung sai trong Project/Project Settings/Computation/Point Tolerances… Cần lưu ý rằng, việc thay đổi dung sai có thể làm mất cờ nhưng thực chất không làm tăng độ chính xác.
Trên hộp thoại Receiver Raw Data Check In cho phép kiểm tra và chỉnh sửa dữ liệu thô trong mỗi file trước khi hoàn thành nhập dữ liệu. Trên hộp thoại, có ba thẻ lựa chọn ở góc dưới bên trái gồm: Point, Antenna và Receiver.
Khi chọn Pointsẽ có các thông báo về tên điểm (Point ID), tên tệp số liệu (File Name), thời gian bắt đầu thu (Star Time), thời gian kết thúc (End Time), thời gian thu tín hiệu (Duration)….
Khi chọn Antenna sẽ hiển thị loại anten (Type), điểm tính độ cao anten (Antenna Phase Center), độ cao anten (Height), tại đây cho phép kiểm tra độ cao anten, nhập vào độ cao anten (nếu chưa có) hoặc chỉnh sửa lại độ cao anten.
Khi chọn Receiver, sẽ hiển thị chủng loại máy thu sử dụng, nơi chế tạo (Manufacture), kiểu sso (Survey Mode), số hiệu máy thu (Serial Number)…
Sau khi các file dữ liệu thô được nhập vào,Plan View hiển thị tất cả cắc cạnh trong mạng lưới (màu xanh lam) . Do dữ liệu thuộc đo tĩnh, nên các cạnh phải được xử lý ở bước tiếp theo.
Chỉnh sửa các file dữ liệu nhập:
Có thể chỉnh sửa các file dữ liệu thô trong khi nhập bằng cách sử dụng hộp thoại Receiver Raw Data Check In. Cũng có thể chỉnh sửa các file kể cả khi chúng đã được nhập. Sai sót thường gặp trong quá trình đo đạc thực hiện là nhập tên điểm và nhập độ cao anten sai. Để xem danh sách các điểm trong project cần thực hiện:
Chọn View/Project Explorer.
Chọn điểm để chỉnh sửa tên điểm (nếu đã nhập sai) trong Project Explorer (nhấn Ctrl và nhấn vào mỗi điểm).
Chọn Point/Merge Points đánh dấu chọn điểm sai.
Trong phần Select Points đánh dấu chọn điểm sai.
Nhấn OK. Trong Project Explorer, bây giờ chỉ còn một Point ID cho điểm đúng.
Nếu độ cao anten sai, việc chỉnh sửa được thực hiện trên hộp thoại Receiver Raw Data Check In.
7.4. Xử lý cạnh
Sau khi kiểm tra số liệu đã nhập vào Project, có thể tiến hành xử lý cạnh. Trước hết là xử lý tất cả các cạnh theo các tham số mặc định. Cũng có thể chỉ xử lý các cạnh độc lập để đáp ứng các yêu cầu kỹ thuật hoặc các cạnh yêu cầu thiết kế lưới GPS.
7.4.1. Xem các cấu hình xử lý cạnh
Trước khi bạn tiến hành xử lý cạnh, bạn có thể xem các cấu hình xử lý cạnh. Để xem các cấu hình này, chọn Project/Project Settings.
Có thể tùy chọn các cấu hình dùng trong xử lý cạnh theo yêu cầu của người xử lý. Nếu không chọn, quá trình xử lý được thực hiện theo cấu hình mặc định.
Khi xử lý cạnh, cần biết tọa độ tuyệt đối của điểm đầu cạnh. Thông thường tọa độ tuyệt đối được xác định theo kết quả định vị tuyệt đối với sai số trong phạm vi khoảng . Trong trường hợp cần xử lý với độ chính xác cao, cần phải nhập tọa độ chính xác trong hệ WGS-84 của ít nhất một điểm trong lưới. Phần mềm TBC cho phép nhập tọa độ chính xác từ Project/Import.
7.4.2. Xử lý cạnh
Nếu một phần của lưới được chọn thì chỉ các cạnh đó được xử lý. Nếu không chọn cạnh nào thì tất cả các cạnh chưa xử lý sẽ được xử lý. Để khởi động xử lý cạnh ta chọn Survey/Processing Baselines hoặc nhấn biểu tượng Process Baselines trên thanh công cụ.
Trong quá trình xử lý, hộp thoại Process Baselines xuất hiện . Khi quá trình xử lý cạnh kết thưc, có thể xem kết quả trước khi lưu các véc tơ cạnh đã được xử lý.
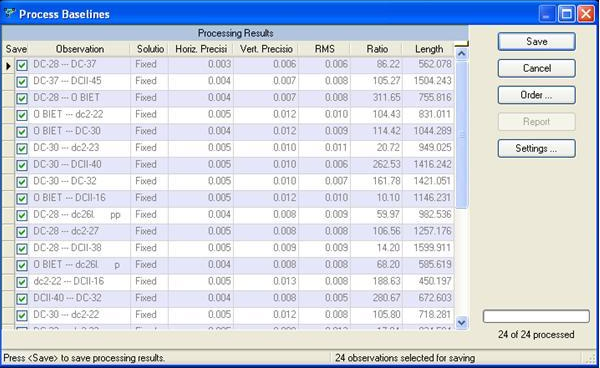
Chất lượng cạnh xử lý là FIXED hay FLOAT thể hiện trên cột Solution Type. Trên hộp thoại Process Baselines cho biết các thông tin khác nhau như RATIO, RMS, chiều dài cạnh (Length)… các cạnh có lời giải FIXED được đánh dấu để lưu (save). Trên hình 7 kèm theo thông báo có số cạnh đã được xử lý và số cạnh có lời giải Fixed, được tự động đánh dấu chọn để lưu. Sau khi đã xem toàn bộ kết quả, nhấn Save để lưu các véc tơ đã được xử lý vào cơ sở dữ liệu Project.
Sau khi các véc tơ cạnh đã được xử lý và được lưu, các cạnh trên hình lưới sẽ tự chuyển sang màu xanh nước biển.
Đối với những cạnh có chất lượng kém cần phải xử lý can thiệp để nâng cao chất lượng cạnh. Phần mềm TBC cho phép người tính can thiệp để nâng cao nhờ chức năng Session Editor. Trong đó người xử lý có thể tăng góc ngưỡng, cắt bỏ thời gian… Để mở Session Editor, trước hết chọn View/New Time-Based View, khi đó sẽ xuất hiện của sổ thời gian sẽ xuất hiện thông báo
Để thiết lập góc ngưỡng của vệ tinh, ta sử dụng Project/Project Settings và trên hộp thoại Project Settings chọn Baseline Processing/Satellites. Trên hộp thoại này ta chọn góc ngưỡng trong trường Elevation Mask.
7.4.3. Xem danh sách các vector
Có thể xem tất cả các véc tơ có trong project bằng cách chọn View/New Vector Spreadsheet hoặc nhấn biểu tượng New Vector Speadsheet trên thanh công cụ View.
Danh sách các vector xuất hiện (hình 3.16), trên đó thông báo điểm đầu cạnh, điểm cuối cạnh, dạng lời giả, độ chính xác chiều dài (bằng), độ chính xác chênh cao , các gia số tọa độ không gian địa tâm , chiều dài cạnh, độ cao anten của các điểm đầu cạnh…
Để xem chi tiết kết quả giải vector cạnh, sử dụng Reports/Baseline Processing Report
7.5. Xem báo cáo kết quả khép hình
Báo cáo Loop Closure Results là một cách rất hiệu quả để phát hiện các sai số thô trong bộ dữ liệu như sai số chiều cao anten, sai số dọi điểm…
Để tính toán sai số khép hình và tạo báo cáo về sai số khép hình kết quả đo GPS (GNSS Loop Closure Results), chọn Survey/GNSS Loop Closure hoặc nhấn biểu tượng GNSS Loop Closure Results và thực hiện thao tác ghi tham số lựa chọn trong Report Setting.
Các tham số lựa chọn gồm số cạnh trong vòng khép (Legs), chỉ tiêu (giới hạn) đạt hay không đạt (Pass/Fail Criteria) dưới dạng sai số tương đối (phần triệu –PPM).
Lựa chọn nội dung hiển thị (Show) trong báo cáo khép hình cũng được thực hiện trong Report Sections, trong đó có thể lựa chọn cho hiển thị những vòng không đạt (Failed Loops)và hiển thị cả vòng đạt (Passed Loops)
7.6. Bình sai lưới
Khi tất cả các cạnh trong lưới đã được xử lý và kiểm tra, có thể tiến hành bình sai mạng lưới trong hệ tọa độ vuông góc phẳng UTM (đã được định nghĩa và lựa chọn từ trước)
Đánh dấu điểm gốc (chọn làm điểm gốc tối thiểu) bằng cách chuột trái chọn điểm sau đó chuột trái chọn Add Coordinate để nhập tọa độ UTM (Grid) và độ cao thủy chuẩn (Elevation) của điểm gốc này.
Sau khi nhập cần chuyển ghi chú (?) thành giá trị gốc (Control Quality), ghi chú sẽ được chuyển thành tam giác . Cần lưu ý rằng, phải nhập tọa độ của điểm gốc đã được chuyển về múi chiếu phù hợp với lựa chọn.
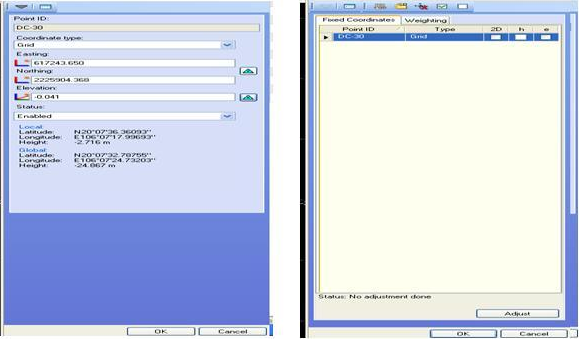
Sau đó nhấn Adjust để bình sai mạng lưới. Sau đó trên cửa sổ Plan View, sơ đồ mạng lưới sẽ được thể hiện.
Thường sau kết quả bình sai lần thứ nhất, thông báo kết quả không đạt do vấn đề trọng số đầu vào, điều đó thể hiện ở giá trị Reference factor của lưới không bằng 1 và kiểm định chi- bình phương (Chi Square) thất bại (Failed). Trong trường hợp này, ta phải bình sai lần thứ hai sau khi chỉnh lại trọng số nhập và trọng số nhận sau bình sai lần thứ nhất. Trong hộp thoại Adjust Netwwork, chọn thẻ Weighting để thay đổi trọng số. Sau bình sai lần hai, giá trị Reference Factor sẽ là 1.00 và kiểm định Chi Square thành công (Passed).
Để xem báo cáo Network Adjust Reportnhấn biểu tượng Report. Phần mềm tạo báo cáo Network Adjusts Report ở dạng file html.
8. Ưu nhược điểm của phương pháp đo GNSS tĩnh
Phương pháp đo tĩnh được sử dụng để xác định hiệu toạ độ (hay vị trí tương hỗ) giữa hai điểm xét với độ chính xác cao, thường là nhằm đáp ứng các yêu cầu của công tác trắc địa địa hình.
Trong trường hợp này cần có hai máy thu GPS, một máy đặt ở điểm đã biết toạ độ, còn máy kia đặt ở điểm cần xác định. Cả hai máy phải đồng thời thu tín hiệu từ một số vệ tinh chung liên tục trong một khoảng thời gian nhất định, thường là từ một tiếng đến hai ba tiếng đồng hồ.
Số vệ tinh tối thiểu cho cả hai trạm quan sát là 3, nhưng thường lấy là 4 để đề phòng trường hợp thu tín hiệu vệ tinh bị gián đoạn.
Khoảng thời gian quan sát phải kéo dài là để đủ cho đồ hình phân bố vệ tinh thay đổi mà từ đó ta có thể xác định được số nguyên đa trị của sóng tải và đồng thời là để có nhiều trị đo nhằm đạt được độ chính xác cao và ổn định kết quả quan sát.
Ưu điểm: Đây là phương pháp cho phép đạt độ chính xác cao nhất trong việc định vị tương đối bằng GPS, có thể đạt cỡ centimét, thậm chí milimét ở khoảng cách giữa hai điểm xét tới hàng chục và hàng trăm kilômét.
Nhược điểm: phương pháp đo GPS tĩnh có nhược điểm là thời gian đo kéo dài, do vậy năng suất đo thường không cao.

Từ khóa » Tín Hiệu Gnss
-
GPS, GNSS Là Gì? Hệ Thống Thiết Bị đo đạc - THC
-
GNSS Là Gì, GPS Là Gì? - Máy Trắc địa
-
Cấu Trúc Tín Hiệu Của Hệ Thống GNSS được Thể Hiện Qua Ba Thành ...
-
Khái Niệm Hệ Thống định Vị GNSS, GPS 2021 Và Tương Lai
-
Thiết Bị Kiểm định Các Bộ Thu Tín Hiệu GNSS - TECOTEC Group
-
GNSS Là Gì
-
Khái Niệm Về Công Nghệ GNSS - GPS - RTK - Mới Nhất - Trắc Địa TAP
-
GNSS Là Gì? Lịch Sử Và ứng Dụng - Https://www.hi
-
[PDF] 1 CÔNG NGHỆ GNSS VÀ LƯỚI KHỐNG CHẾ TỌA ĐỘ QUỐC GIA ...
-
Nghiên Cứu Phát Triển Máy Thu định Vị Toàn Cầu GNSS đa Kênh Dựa ...
-
Trimble Catalyst - Phần Mềm Thu Tín Hiệu GNSS
-
Hãng Sản Xuất Vệ Tinh GPS GNSS Bộ Thu Phát Tín Hiệu Định Vị ...
-
Giải Pháp đồng Bộ Tín Hiệu định Vị Trong Bộ Thu GPS Dựa Trên Công ...