Động Cơ AC (Kiến Thức Từ Zero đến Hero)
Có thể bạn quan tâm
- Tốc độ đột Biến Gen Có Thể Xảy Ra ở
- Tốc độ đô Thị Hóa Nhanh ở Trung Và Nam Mĩ Là Hệ Quả Của
- Tốc độ đô Thị Hóa Nhanh ở Trung Và Nam Mĩ Là Hệ Quả Của (25 điểm)
- Tốc độ đô Thị Hóa Nhanh ở Trung Và Nam Mĩ Là Hệ Quả Của (4 điểm)
- Tốc độ đô Thị Hóa Nhanh ở Trung Và Nam Mĩ Là Hệ Quả Của A. Tốc độ Phát Triển Kinh Tế Nhanh
Động cơ không đồng bộ và đồng bộ là hai nhóm chính của của động xoay chiều
Mục lục [Hiển thị]
- 1/ Động cơ AC không đồng bộ
- 1.1/ Động cơ cảm ứng là gì?
- 1.2/ Động cơ đa pha
- A/ Loại thiết kế A và B
- B/ Loại thiết kế C
- C/ Loại thiết kế D
- D/ Loại thiết kế F
- 1.3/ Động cơ có Roto quấn dây
- 1.4/ Động cơ đa tốc độ
- 1.5/ Động cơ AC 1 pha
- A/ Động cơ vạn năng
- 2/ Động cơ AC đồng bộ
- 2.1/ Khởi động động cơ AC đồng bộ
- 3/ Động cơ định thời
- 4/ Động cơ AC Servo
1/ Động cơ AC không đồng bộ
Động cơ cảm ứng là một dạng phổ biến của động cơ không đồng bộ và về cơ bản là một máy biến áp xoay chiều có một cuộn thứ cấp quay. Cuộn dây sơ cấp (stator) được kết nối với nguồn điện và cuộn thứ cấp (rôto) mang dòng thứ cấp cảm ứng. Mô-men xoắn được tạo ra bởi tác động của dòng điện rôto (thứ cấp) trên từ thông. Động cơ đồng bộ khác nhau rất nhiều về đặc điểm thiết kế và vận hành, và được coi là một loại động cơ riêng biệt.

1.1/ Động cơ cảm ứng là gì?
Động cơ cảm ứng là loại động cơ điện đơn giản và chắc chắn nhất và bao gồm hai bộ phận điện cơ bản: cuộn dây stato bao quanh và cụm rôto quay. Động cơ cảm ứng lấy tên của nó từ dòng điện chạy trong bộ phận thứ cấp (rôto) được tạo ra bởi dòng điện xoay chiều chạy trong bộ phận chính (stato). Các hiệu ứng điện từ kết hợp của dòng điện stato và rôto tạo ra lực để tạo ra sự quay.
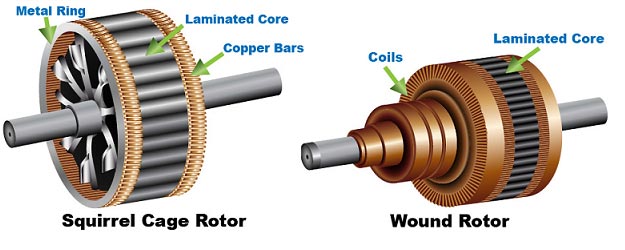
Roto thường bao gồm một lõi sắt hình trụ nhiều lớp với các khe để nhận dây dẫn. Loại rôto phổ biến nhất có dây dẫn bằng nhôm đúc và vòng cuối ngắn mạch. “Lồng sóc” này quay khi từ trường chuyển động tạo ra dòng điện trong các dây dẫn.
Tốc độ mà từ trường quay là tốc độ đồng bộ của động cơ và được xác định bởi số cực trong stato và tần số của nguồn cấp điện:
ns = 120f/p
Trong đó: ns = tốc độ đồng bộ, f = tần số, và p = số cặp cực.
Tốc độ đồng bộ là giới hạn trên tuyệt đối của tốc độ động cơ. Nếu rôto quay nhanh chính xác như tốc độ từ trường quay, thì không có dòng lực nào bị cắt bởi các dây dẫn của rôto, và mô-men xoắn lúc này bằng không. Trên thực tế, rôto luôn quay chậm hơn từ trường. Tốc độ chỉ đủ chậm để làm cho dòng điện trong rôto chạy qua, do đó mô-men xoắn thu được đủ để chống lại lực cản do gió và ma sát, và tải.
Chênh lệch tốc độ giữa rôto và từ trường, được gọi là trượt, được tính theo phần trăm của tốc độ đồng bộ:
s = 100 (ns – na)/ns
Trong đó: s = trượt, ns = tốc độ đồng bộ và na = tốc độ thực tế
1.2/ Động cơ đa pha
Động cơ đa pha lồng sóc là loại động cơ có tốc độ không đổi, nhưng một số mức độ linh hoạt khác nhau về đặc tính vận hành là kết quả của việc chỉnh sửa thiết kế rôto. Những biến thể này tạo ra những thay đổi về mô-men xoắn, dòng điện và tốc độ đầy tải. Sự tiến hóa và tiêu chuẩn hóa đã tạo ra bốn loại động cơ cơ bản.
A/ Loại thiết kế A và B
Động cơ đa năng với mô-men xoắn và dòng khởi động trung bình, và độ trượt thấp. Động cơ đa pha loại phân số mã lực thường có thiết kế B. Do các tính chất giảm dần của thiết kế B, động cơ đa năng tạo mô-men xoắn (tối đa) giống như động cơ một pha, nhưng không thể đạt được thời điểm giao nhau giữa mô-men xoắn và tốc độ như động cơ một pha. Do đó, mô-men xoắn tối đa của động cơ loại B phải lớn hơn (tối thiểu 140% mô-men xoắn tối đa của động cơ một pha, đa năng) để tốc độ đầy tải có thể so sánh được.
B/ Loại thiết kế C
Mô-men xoắn khởi động cao với dòng khởi động bình thường và độ trượt thấp. Thiết kế này thường được sử dụng khi khởi động tải cao, nhưng thường chạy ở mức tải định mức và không phải chịu các yêu cầu quá tải cao sau khi đạt được tốc độ chạy.
C/ Loại thiết kế D
Độ trượt cao, mô-men xoắn khởi động rất cao, dòng khởi động thấp và tốc độ đầy tải thấp. Do độ trượt cao, tốc độ có thể giảm khi gặp tải trọng dao động. Thiết kế này được chia thành nhiều nhóm khác nhau tùy theo độ trượt hoặc hình dạng của đường cong mô-men và tốc độ.
D/ Loại thiết kế F
Loại này có mô-men xoắn khởi động thấp, dòng khởi động thấp, độ trượt thấp và được chế tạo để có dòng điện khóa rôto thấp. Cả mô-men xoắn khóa và mô-men xoắn đỉnh đều thấp. Thường được dùng khi mô-men xoắn khởi động thấp và tải vừa phải sau khi đạt được tốc độ chạy ổn định.
1.3/ Động cơ có Roto quấn dây
Động cơ rô-to lồng sóc thường có đặc điểm tốc độ và mô-men xoắn không linh hoạt, nhưng một phiên bản đặc biệt của động cơ rô-to quấn dây có tốc độ và mô-men xoắn có thể kiểm soát được. Ứng dụng của nó khác biệt rõ rệt với động cơ rô-to lồng sóc vì khả năng điều khiển của mạch rôto. Đặc tính hiệu suất thay đổi được bằng cách thêm vào các giá trị điện trở khác nhau trong mạch rôto.
Động cơ rô-to quấn dây thường được thêm vào điện trở thứ cấp trong mạch rôto. Trở kháng giảm dần để cho phép động cơ tăng tốc. Do đó, động cơ có thể xuất ra mô-men xoắn đáng kể trong khi hạn chế dòng rô-to bị khóa. Điện trở thứ cấp này có thể được thiết kế nhằm tản nhiệt sinh ra do hoạt động liên tục ở tốc độ giảm tốc, tăng tốc thường xuyên hoặc tăng tốc với tải quán tính lớn. Trở kháng ngoài tạo ra sự sụt giảm lớn tốc độ rpm khi có một thay đổi nhỏ về tải. Tốc độ giảm tốc giảm xuống khoảng 50% tốc độ định mức, nhưng hiệu suất khá thấp.
1.4/ Động cơ đa tốc độ
Động cơ đa cực được thiết kế để chạy một tốc độ. Bằng cách kết nối vật lý các đầu nối, tỷ lệ tốc độ 2: 1 có thể đạt được. Tốc độ đồng bộ điển hình cho động cơ 60 Hz là: 3,600/1,800 rpm (2/4 cực), 1,800/900 rpm (4/8 cực), and 1,200/600 rpm (6/12 cực).
Động cơ hai cuộn dây có hai cuộn dây riêng biệt có thể được quấn cho bất kỳ số cực nào để có thể đạt được các tỷ số tốc độ khác nhau. Tuy nhiên, tỷ số lớn hơn 4: 1 không thực tế vì liên quan đến kích thước và trọng lượng của động cơ. Động cơ đa tốc độ một pha thường có thiết kế mô-men xoắn thay đổi, nhưng loại động cơ có mô-men xoắn và công suất không đổi cũng có sẵn trên thị trường.
Công suất đầu ra của động cơ đa tốc độ có thể được điều chỉnh với từng tốc độ khác nhau. Những động cơ này được thiết kế với công suất mã lực đầu ra theo một trong các đặc điểm tải sau đây.
- Mô-men xoắn biến thiên: Động cơ có mô-men xoắn tỉ lệ với bình phương của tốc độ. Ví dụ, động cơ 1800/900 rpm, tạo ra 10 hp tại 1800 rpm, tạo ra 2,5 hp tại 900 rpm. Tùy thuộc vào tải, ví dụ như máy bơm ly tâm, quạt và máy thổi, có yêu cầu mô-men xoắn thay đổi theo bình phương hoặc mũ ba của tốc độ.
- Mô-men xoắn cố định: Những động cơ này có thể tạo ra cùng một mô-men xoắn ở nhiều tốc độ, do đó công suất đầu ra thay đổi trực tiếp theo tốc độ. Ví dụ, một động cơ tạo ra 10 hp tại 1800 rpm, tạo ra 5 hp tại 900 rpm. Những động cơ này được sử dụng trong các ứng dụng có yêu cầu mô-men xoắn không đổi như máy trộn, băng tải và máy nén.
- Công suất cố định: Những động cơ này tạo ra cùng một mã lực ở mỗi tốc độ và mô-men xoắn tỷ lệ nghịch với tốc độ. Các ứng dụng điển hình bao gồm các công cụ máy móc như máy khoan, máy tiện và máy phay.
1.5/ Động cơ AC 1 pha
Động cơ cảm ứng một pha thường là loại có công suất nhỏ, có sẵn trong dải mã lực thấp hơn. Các loại động cơ cỡ nhỏ phổ biến nhất là pha lệch pha, khởi động tụ điện, tụ điện tách vĩnh viễn và cực bóng.
Các động cơ có nhiều loại tốc độ, nhưng có giới hạn thực tế về số lượng tốc độ đạt được. Động cơ hai, ba và bốn tốc độ có sẵn, và lựa chọn tốc độ có thể được thực hiện bằng các phương pháp đảo cực hoặc quấn hai cuộn dây.
Động cơ một pha chạy theo hướng quay mà chúng được khởi động, và chúng được bắt đầu theo hướng xác định trước theo các kết nối điện, hoặc cài đặt cơ học của phương tiện khởi động. Động cơ vạn năng có thể được vận hành theo một trong hai hướng, nhưng vòng quay tiêu chuẩn ngược chiều kim đồng hồ khi quay mặt về phía đối diện với trục truyền động. Động cơ có thể được kết nối lại để đảo ngược hướng quay.

A/ Động cơ vạn năng
Động cơ đa năng hoạt động với hiệu suất gần tương đương nhau với cả dòng điện một chiều hoặc dòng điện xoay chiều tần số 60 Hz. Nó khác với dòng động cơ DC vì tỷ lệ quấn dây và các lớp sắt mỏng hơn. Một động cơ đa năng có thể hoạt động trên dòng DC với hiệu suất cơ bản tương đương, nhưng với tốc độ và tuổi thọ chổi than kém hơn so với động cơ DC cơ bản.
Một đặc điểm quan trọng của động cơ đa năng là nó có tỷ số mã lực trên mỗi pound cao nhất so với bất kỳ động cơ xoay chiều nào vì nó có thể hoạt động ở tốc độ cao hơn nhiều lần so với bất kỳ động cơ 60 Hz nào khác.
Khi vận hành không tải, động cơ đa năng có xu hướng chạy hết công suất, tốc độ chỉ bị giới hạn bởi sức gió, ma sát và đảo chiều nguồn điện. Do đó, các động cơ đa năng lớn hầu như luôn được kết nối trực tiếp với tải để hạn chế tốc độ. Trên các dụng cụ cầm tay như cưa điện, tải trọng được hạn chế bởi các bánh răng, ổ trục và quạt làm mát là đủ để giữ tốc độ không tải xuống đến giá trị an toàn.
Với một động cơ đa năng, điều khiển tốc độ rất đơn giản, vì tốc độ động cơ nhạy cảm với cả thay đổi điện áp và từ thông. Với bộ biến trở hoặc bộ tự động điều chỉnh, tốc độ động cơ có thể dễ dàng thay đổi từ tốc độ tối đa về không.
2/ Động cơ AC đồng bộ
Động cơ AC đồng bộ vốn dĩ là động cơ có tốc độ không đổi và chúng hoạt động đồng bộ tuyệt đối với tần số dòng. Đối với động cơ cảm ứng lồng sóc, tốc độ được xác định bởi số cặp cực và luôn tỷ lệ với tần số dòng.
Động cơ đồng bộ có nhiều kích cỡ khác nhau, từ đơn vị tự kích thích công suất nhỏ đến động cơ kích thích dòng điện một chiều, công suất lớn dùng cho truyền động công nghiệp. Trong phạm vi công suất nhỏ, động cơ đồng bộ được sử dụng chủ yếu khi yêu cầu tốc độ không đổi chính xác.
Trong các động cơ có kích cỡ và mã lực lớn áp dụng cho tải công nghiệp, động cơ đồng bộ phục vụ hai chức năng quan trọng. Đầu tiên, đây là một phương pháp đem lại hiệu quả cao để chuyển đổi năng lượng từ dòng điện xoay chiều thành năng lượng cơ học. Thứ hai, nó có thể hoạt động ở hệ số công suất dẫn đầu hoặc thống nhất, do đó cung cấp hiệu chỉnh hệ số công suất.
Có hai loại động cơ đồng bộ chính: không kích thích và kích thích từ dòng điện một chiều.
Dộng cơ không kích thích được tạo ra theo thiết kế miễn cưỡng và trễ. Các động cơ này sử dụng mạch tự khởi động và không yêu cầu nguồn cung cấp kích thích bên ngoài.
Động cơ kích thích dòng DC có kích thước lớn hơn 1 hp và yêu cầu dòng điện một chiều đủ mạnh để vượt qua các vòng trượt để tạo kích thích. Dòng điện một chiều có thể được cung cấp từ nguồn riêng hoặc từ máy phát điện một chiều nối trực tiếp với trục động cơ.

2.1/ Khởi động động cơ AC đồng bộ
Động cơ AC đồng bộ một pha hoặc nhiều pha không thể khởi động mà không được dẫn động, hoặc kết nối rôto của chúng dưới dạng mạch tự khởi động. Vì trường điện từ quay với tốc độ đồng bộ, động cơ phải được tăng tốc trước khi nó có thể kéo vào đồng bộ. Tăng tốc từ tốc độ 0 cho đến khi đạt được đồng bộ. Do đó, phải sử dụng các phương pháp khởi động riêng biệt.
Với các thiết kế có mạch tự khởi động, kích thước “fhp” sử dụng các phương pháp khởi động phổ biến cho động cơ cảm ứng (tách pha, khởi động tụ điện, khởi động đẩy và cực bóng mờ). Đặc tính điện của các động cơ này khiến chúng tự động chuyển sang hoạt động đồng bộ.
Mặc dù động cơ kích thích từ dòng một chiều có lồng sóc để khởi động, được gọi là cuộn dây điều tiết, mômen khởi động vốn đã thấp và nhu cầu về nguồn điện một chiều đòi hỏi hệ thống khởi động cung cấp bảo vệ động cơ đầy đủ khi khởi động, áp dụng kích thích trường một chiều vào thời điểm thích hợp , loại bỏ kích từ trường khi rôto kéo ra (momen xoắn cực đại), và bảo vệ cuộn dây lồng sóc chống lại hư hỏng nhiệt trong điều kiện lệch bước.
- Momen xoắn kéo lên là mô-men xoắn nhỏ nhất được phát triển từ điểm dừng đến điểm kéo vào. Mô-men xoắn này phải lớn hơn mô-men xoắn tải với một biên độ vừa đủ để duy trì tốc độ gia tốc thỏa mãn trong điều kiện điện áp bình thường.
- Momen cản là kết quả của hướng sali (hướng ưu tiên của từ hóa) của các mảnh cực rôto và xung ở tốc độ dưới mức đồng bộ. Nó cũng có ảnh hưởng đến mômen kéo vào và kéo ra của động cơ vì rôto cực nổi không được kích thích có xu hướng tự điều chỉnh với từ trường stato để duy trì từ trở tối thiểu. Mô-men xoắn miễn cưỡng này có thể đủ để kéo vào một hệ thống tải nhẹ đồng bộ, quán tính thấp và xuất mô-men xoắn kéo ra xấp xỉ 30%.
- Momen xoắn đồng bộ là mô-men xoắn được phát triển sau khi có kích thích và đại diện cho tổng mô-men xoắn ở trạng thái ổn định có sẵn để truyền tải. Nó đạt cực đại ở độ trễ xấp xỉ 70 ° của rôto phía sau từ trường quay stato. Giá trị lớn nhất này thực ra là giá trị mô-men xoắn kéo ra.
- Mômen kéo ra là lực mômen duy trì lớn nhất mà động cơ tạo ra ở tốc độ đồng bộ trong một phút với tần số danh định và kích thích bình thường. Mô-men xoắn kéo ra thông thường thường là 150% mô-men xoắn đầy tải đối với động cơ có hệ số công suất thống nhất và 175% đến 200% đối với động cơ có hệ số công suất 0,8.
- Momen kéo vào của động cơ không đồng bộ là mô-men mà nó tạo ra khi kéo tải quán tính thành đồng bộ khi áp dụng kích thích. Mômen kéo vào được phát triển trong quá trình chuyển đổi từ tốc độ trượt sang tốc độ đồng bộ, khi động cơ chuyển từ trạng thái cảm ứng sang hoạt động đồng bộ. Đây thường là giai đoạn quan trọng nhất trong quá trình khởi động của động cơ đồng bộ. Mômen được tạo bởi cuộn dây van điều tiết và cuộn dây trường trở về 0 ở tốc độ đồng bộ. Do đó, tại điểm kéo vào, chỉ có mômen cản và mômen đồng bộ do kích thích các cuộn dây trường mới có hiệu quả.
3/ Động cơ định thời
Động cơ định thời được đánh giá dưới 1/10 mã lực và được sử dụng làm động cơ chính cho các thiết bị định thời. Vì động cơ được sử dụng như một bộ đếm thời gian, nó phải chạy với tốc độ không đổi.
Động cơ xoay chiều và một chiều có thể được sử dụng làm động cơ định thời. Động cơ định thời DC được sử dụng cho các ứng dụng di động hoặc những nơi yêu cầu các biến thể tốc độ cao và tốc độ thấp. Ưu điểm của nó bao gồm mô-men xoắn khởi động cao gấp mười lần mô-men xoắn chạy, hiệu suất từ 50 đến 70% và điều khiển tốc độ tương đối dễ dàng. Nhưng cần phải có một số dạng bộ điều tốc, cơ hoặc điện tử.
Động cơ định thời AC sử dụng nguồn điện sẵn có, chi phí thấp hơn, tuổi thọ dài hơn và không tạo ra “RFI”. Tuy nhiên, động cơ xoay chiều không thể dễ dàng thích ứng với các ứng dụng di động, có mômen khởi động tương đối thấp và kém hiệu quả hơn nhiều so với động cơ một chiều.
4/ Động cơ AC Servo
Động cơ servo AC được sử dụng trong các cơ chế servo dùng AC và máy tính đòi hỏi các đặc tính phản hồi nhanh chóng và chính xác. Để có được những đặc điểm này, động cơ servo có rôto điện trở cao và có đường kính nhỏ. Đường kính nhỏ cung cấp quán tính thấp để khởi động, dừng và đảo chiều nhanh chóng, trong khi lực cản cao cung cấp mối quan hệ tốc độ và momen xoắn gần như tuyến tính để điều khiển chính xác.

Động cơ Servo được quấn theo hai pha vật lý ở góc vuông hoặc theo phương vuông góc trong không gian. Cuộn dây cố định hoặc cuộn dây tham chiếu được kích thích từ nguồn điện áp cố định, trong khi cuộn dây điều khiển được kích thích bằng điện áp điều khiển có thể điều chỉnh hoặc thay đổi, thường là từ bộ khuếch đại servo. Các cuộn dây thường được thiết kế với cùng tỷ lệ vòng điện áp, sao cho cân bằng các đầu vào công suất ở pha cố định cực đại và tín hiệu pha điều khiển cực đại.
Trong một động cơ servo lý tưởng, momen xoắn ở tốc độ bất kỳ tỷ lệ thuận với điện áp cuộn dây điều khiển. Tuy nhiên, trong thực tế, mối quan hệ này chỉ tồn tại ở tốc độ bằng không do động cơ cảm ứng không có khả năng đáp ứng với sự thay đổi điện áp đầu vào trong điều kiện tải nhẹ.
Tính giảm xóc vốn có của động cơ servo giảm khi công suất tăng lên và động cơ có hiệu suất vừa phải khi giảm tuyến tính tốc độ-mô-men xoắn. Hầu hết các động cơ lớn hơn đều có quạt gió phụ tích hợp để duy trì nhiệt độ trong phạm vi hoạt động an toàn. Động cơ Servo có sẵn ở các mức công suất từ nhỏ hơn 1 đến 750 W, với kích thước từ 0,5 đến 7 inch đường kính ngoài. Hầu hết các thiết kế đều có sẵn với đầu mô-đun hoặc lắp sẵn.
Từ khóa » Tốc độ đồng Bộ Là Gì
-
Quan Hệ Giữa Tốc độ đồng Bộ Và Tốc độ định Mức Trong động Cơ Cảm ...
-
Động Cơ đồng Bộ – Wikipedia Tiếng Việt
-
Quan Hệ Giữa Tốc độ đồng Bộ Và Tốc độ định Mức Trong động Cơ Cảm ...
-
So Sánh Động Cơ Điện Đồng Bộ Và Không Đồng Bộ - MinhMOTOR
-
Sự Khác Biệt Giữa động Cơ đồng Bộ Và động Cơ Không đồng Bộ
-
[PDF] 1 Chương 3: động Cơ Không đồng Bộ
-
So Sánh Động Cơ Điện Đồng Bộ Và Động Cơ Điện Không Đồng Bộ
-
Máy điện đồng Bộ, Động Cơ đồng Bộ - Kiến Thức Tự Động Hóa
-
Phương Pháp điều Chỉnh Tốc độ động Cơ Không đồng Bộ
-
Sự Khác Biệt Giữa động Cơ đồng Bộ Và Không đồng Bộ - Sawakinome
-
động Cơ đồng Bộ (Linh Kiện điện Tử) - Mimir Bách Khoa Toàn Thư
-
[PDF] KHỞI ĐỘNG VÀ ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ KHÔNG ĐỒNG BỘ
-
[PDF] Chương 4 MÁY ĐIỆN KHÔNG ĐỒNG BỘ 4.1. CHUẨN ĐẦU RA
-
Sự Khác Biệt Giữa động Cơ đồng Bộ Và động Cơ Không đồng Bộ
-
Động Cơ đồng Bộ Và ứng Dụng - Bảo An Automation
-
[PDF] Máy điện đồng Bộ
-
#1 Máy Phát điện đồng Bộ: Cấu Tạo Và Nguyên Lý Hoạt động
-
Từ Trường Trong Máy điện Không đồng Bộ - Thả Rông
-
Động Cơ điện Không đồng Bộ Là Gì? Chi Tiết Về ... - LADIGI Academy