Giới Thiệu Về Công Nghệ Giám Sát đa điểm - VATM
Có thể bạn quan tâm
1. Sự cần thiết của hệ thống giám sát mặt sân
Tại khu bay (đường cất hạ cánh, đường lăn, bến đỗ), kiểm soát viên không lưu chủ yếu sử dụng phương thức điều hành bằng mắt thường để ước lượng vị trí của máy bay và các phương tiện mặt đất cũng như điều hướng giao thông. Trong điều kiện tầm nhìn kém, kiểm soát viên không lưu hoàn toàn phụ thuộc vào phản hổi từ phi công để định vị máy bay. Việc này đã gây ra rất nhiều tai nạn đáng tiếc đặc biệt là ở các sân bay có mật độ giao thông dày đặc.
.jpg)
Va chạm giữa xe tải và máy bay ở sân bay Philadelphia
Để khắc phục vấn đề này Hệ thống kiểm soát và hướng dẫn di chuyển mặt sân (SMGCS) và sau này là phiên bản cao cấp của nó A-SMGCS đã ra đời. A-SMGCS không chỉ giúp kiểm soát viên không lưu điều hành trong điều kiện thời tiết xấu mà còn được sử dụng cho các sân bay có cấu trúc phức tạp hay có mật độ giao thông cao. Một hệ thống A-SMGCS sẽ gồm các chức năng chính sau:
- Giám sát
- Định tuyến
- Dẫn đường
- Kiểm soát
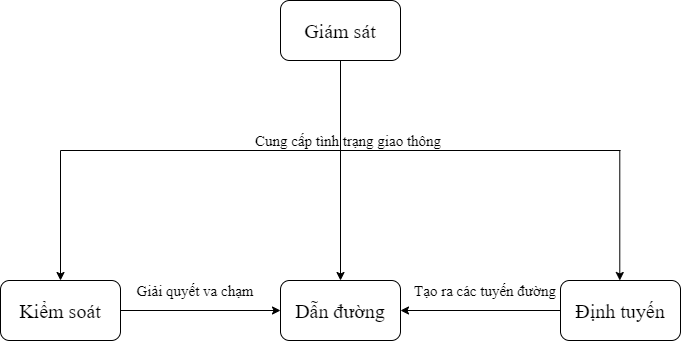
Mối quan hệ giữa các chức năng của A-SMGCS
Có thể dễ nhận thấy, chức năng giám sát đóng vai trò hạch tâm của cả hệ thống A-SMGCS. Radar giám sát mặt sân (SMR) và các công nghệ tương tự thường được sử dụng để thực hiện chức năng này.
SMR là radar sơ cấp nghĩa là: nó sẽ phát ra các sóng điện từ ra ngoài không gian à Những sóng này sẽ phản xạ lại sau khi đập vào các vật thể trong sân bay (máy bay và phương tiện mặt đất) à SMR sẽ thu nhận các sóng phản xạ và tính toán ra hướng cũng như khoảng cách tới mục tiêu dựa trên thời gian di chuyển của sóng điện từ. Radar giám sát mặt sân ALCOR
Radar giám sát mặt sân ALCOR
Mặc dù SMR về cơ bản đã đáp ứng được chức năng giám sát của hệ thống A-SMGCS, tuy nhiên SMR vẫn còn một số nhược điểm như:
- Bị ảnh hưởng khi thời tiết trở nên cực xấu
- Không thể bao phủ được các khu vực bị che lấp bởi vật cản
- Không thể hiện được mã nhận dạng của các phương tiện di chuyển trên màn hình của kiểm soát viên không lưu
- Khái niệm và nguyên lý của hệ thống giám sát đa điểm
MLAT là một hệ thống giám sát phụ thuộc được sử dụng chủ yếu cho các cơ sở điều hành bay trong khu bay. MLAT tiếp nhận và xử lý các bản tin phát ra từ bộ phát đáp trên máy bay (Transponder Mode A/C/S). Điều này cho phép MLAT tận dụng tối đa dữ liệu nhận được từ máy bay mà không cần phải lắp đặt thêm các thiết bị khác trên máy bay. Vì MLAT nhận các bản tin từ Transponder nên nó có khả năng giám sát cả những phương tiện mặt đất có đủ trang thiết bị cần thiết.
Hệ thống giám sát đa điểm (MLAT - Multilateration) được tạo ra để khắc phục các hạn chế trên
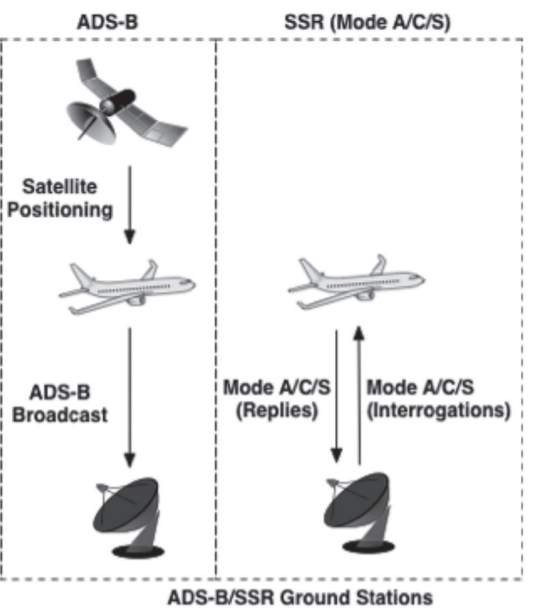
Các loại bản tin phát từ Transponder trên máy bay
Bằng việc sử dụng hệ thống mạng lưới cảm biền gồm nhiều máy thu vô hướng được bố trí một cách hợp lý xung quanh khu vực sân bay, MLAT có thể tính toán chính xác vị trí của máy bay dựa trên thời gian khác biệt mà các máy thu nhận được tín hiệu từ máy bay (TDOA). Tức là vị trí của máy bay sẽ được tính toán từ cơ sở mặt đất chứ không phải bằng cách giải mã bản tin nhận được từ máy bay giống như hệ thống ADS-B. Điều này làm tăng độ tin cậy và tính chủ động cho hệ thống giám sát. Như vậy chỉ cần 3 máy thu bắt được tín hiệu là ta đã có thể xác định tọa độ mục tiêu trong không gian 2 chiều hay 4 máy thu cho không gian 3 chiều.
MLAT có thể bao phủ những vùng trời thấp nơi mà Radar hay ADS-B không bao phủ được với độ chính xác vị trí cao. Hơn nữa, vì MLAT có tính tương thích cao với công nghệ ADS-B nên nó còn có khả năng tạo được cả những bản tin đầu ra giống với bản tin ADS-B. Điều này cho phép MLAT hoạt động như một hệ thống dự phòng hoặc thậm chí thay thế ADS-B tại một số khu vực nhất định. Dữ liệu giám sát từ MLAT cũng có thể được dùng để kiểm tra, tích hợp với dữ liệu giám sát từ Radar hay ADS-B nhằm tăng tính an toàn và hiệu quả cho dịch vụ giám sát hàng không.
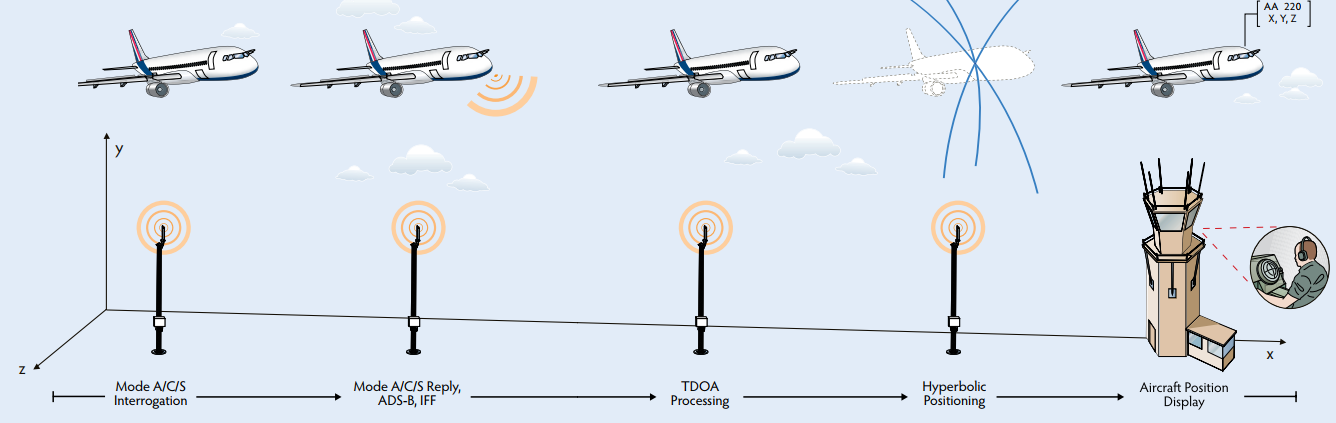
Quá trình xử lý thông tin của MLAT
MLAT chủ yếu được sử dụng trong khu vực tại sân và tiếp cận. Tuy nhiên nếu được nâng cấp lên thành Hệ thống MLAT khu vực rộng (WAM), MLAT còn có thể được sử dụng cả cho dịch vụ điều hành bay tại khu vực đường dài. Trong trường hợp này, nó có thể trở thành nguồn giám sát dự phòng, thay thế cho cả Radar thứ cấp.
Một hệ thống MLAT cơ bản sẽ bao gồm các thành phần sau:
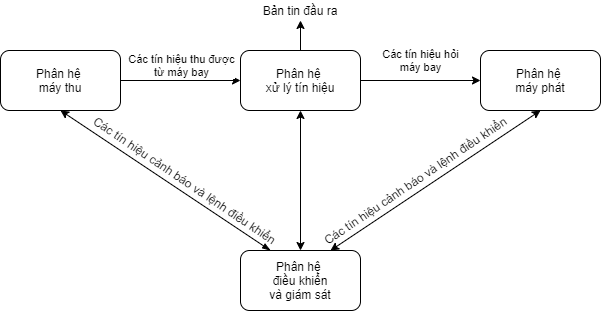
Sơ đồ chung của hệ thống MLAT
- Phân hệ máy thu: Thu nhận tín hiệu phản hồi của máy bay từ các trạm máy thu bên ngoài để đưa về phân hệ xử lý tín hiệu.
- Phân hệ xử lý tín hiệu: Tạo các tín hiệu hỏi để chuyển sang phân hệ máy phát. Xử lý các tín hiệu thu được để đưa ra vị trí và các dữ liệu giám sát của máy báy. Tạo các bản tin giám sát hiển thị trên màn hình của kiểm soát viên không lưu.
- Phân hệ máy phát: Điều chế và khếch đại các tín hiệu hỏi sau đó phát chúng ra ngoài không gian
- Phân hệ giám sát và điều khiển: Giám sát tình trạng chung của toàn bộ hệ thống. Thay đổi tham số và tạo ra các lệnh điều khiển khi cần thiết.
- Phạm Công Nam
Từ khóa » Tín Hiệu Ra đa Là Gì
-
[Tìm Hiểu] Radar Là Gì? Nguyên Lý Và Ứng Dụng Của Radar
-
Ra đa - Wiki Là Gì
-
Radar Là Gì - Nguyên Lý Hoạt động Của Radar ... - WikiHow Tiếng Việt
-
RADAR Là Gì: Khái Niệm Cơ Bản, Loại & Ứng Dụng
-
Cách Radar Hoạt động Như Thế Nào? Hệ Thống Rada Là Gì?
-
Radar Là Gì - Nguyên Lý Hoạt động Của Radar Như Thế Nào
-
Ra đa – Là Gì Wiki
-
Rađa - Wiko
-
Nhiễu Ra đa
-
PHẦN I–KỸTHUẬT RADAR Chương 1 TỔNG QUAN VỀ RADAR
-
Giới Thiệu Về Dịch Vụ Thông Tin, Dẫn đường, Giám Sát - VATM
-
Nguyên Tắc Hoạt động Của Máy Dò Ra-đa - Autodaily
-
RADAR KỸ THUẬT SỐ ĐA HƯỚNG DÒNG MÁY BAY PHUN ...