RFID Giao Tiếp Arduino, Đọc Thẻ Từ RFID + Servo + LCD1602 + ...
Có thể bạn quan tâm
RFID giao tiếp Arduino (Radio Frequency Identification) là dùng công nghệ nhận dạng đối tượng bằng sóng vô tuyến. Công nghệ này cho phép nhận biết các đối tượng thông qua hệ thống thu phát sóng radio, từ đó có thể giám sát, quản lý hoặc lưu vết từng đối tượng. Một hệ thống RFID thường bao gồm 2 thành phần chính là thẻ tag (chip RFID chứa thông tin) và đầu đọc (reader) đọc các thông tin trên chip.
Liên hệ làm Đồ án và Mạch điện tử- Phone : 0967.551.477
- Zalo : 0967.551.477
- FB : Huỳnh Nhật Tùng
- Email : [email protected]
- Địa Chỉ: 106/14 Đường số 51, Phường 14, Gò Vấp, Tp HCM
- Chi tiết: Nhận làm mạch và đồ án Điện tử
Table of Contents
- 1. Linh kiện cần thiết làm mạch thẻ từ RFID giao tiếp Arduino khóa cửa bằng thẻ từ
- 1.1 Vi điều khiển Arduino trong mạch thẻ từ RFID giao tiếp Arduino khóa cửa bằng thẻ từ
- a. Giới thiệu
- Các chức năng khác
- b. Chức năng của Arduino R3:
- Các chức năng khác
- c.Thông số kỹ thuật Arduino Uno R3 (Dip)
- d. Power
- e.Bộ nhớ
- f. Các chân đầu vào và đầu ra
- 1.2 Module thẻ từ RFID giao tiếp Arduino khóa cửa bằng thẻ từ
- a. Giới thiệu thẻ từ rfid
- b. Thông số kỹ thuật thẻ từ rfid
- c. Chức năng các chân thẻ từ rfid
- d. Tính năng thẻ từ rfid
- e. Ứng dụng thẻ từ rfid
- 1.3 LCD1602 cho mạch thẻ từ RFID giao tiếp Arduino khóa cửa bằng thẻ từ
- a. Giới thiệu
- b. Thông số kỹ thuật
- c. Sơ đồ chân LCD 16×2
- d. Địa chỉ ba vùng nhớ
- e. Các lệnh điều khiển của LCD
- Lệnh xoá màn hình “Clear Display”: khi thực hiện lệnh này thì LCD sẽ bị xoá và bộ đếm địa chỉ được xoá về 0.
- Lệnh điều khiển con trỏ hiển thị “Display Control”:
- f. Bảng mã ASCII sử dụng cho LCD
- g. Bảng địa chỉ cho LCD
- 1.4 Động cơ servo trong mạch thẻ từ RFID giao tiếp Arduino khóa số bằng thẻ từ
- a. Giới thiệu
- b. Thông số kỹ thuật
- c. Dạng sóng
- 1.5 Loa 5V cho đề tài đọc thẻ từ RFID giao tiếp Arduino giao tiếp Pic16F
- a. Giới thiệu
- b. Thông số kỹ thuật
- 1.1 Vi điều khiển Arduino trong mạch thẻ từ RFID giao tiếp Arduino khóa cửa bằng thẻ từ
- 2. Hướng dẫn đồ án thẻ từ RFID giao tiếp Arduino khóa cửa bằng Servo
- Phần cứng
- Phần mềm
- 3. Hoạt động của mạch thẻ từ RFID giao tiếp khóa cửa bằng thẻ từ
- 4. Cụ thể hoạt động của mạch thẻ từ RFID giao tiếp Arduino khóa cửa bằng thẻ từ:
1. Linh kiện cần thiết làm mạch thẻ từ RFID giao tiếp Arduino khóa cửa bằng thẻ từ
1.1 Vi điều khiển Arduino trong mạch thẻ từ RFID giao tiếp Arduino khóa cửa bằng thẻ từ
a. Giới thiệu
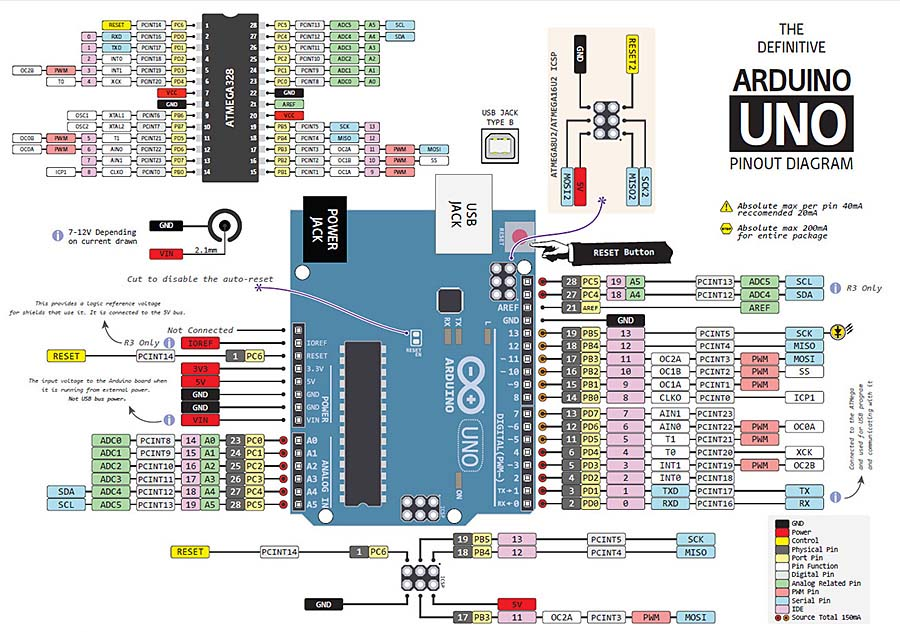
Arduino Uno R3 (Dip) có 14 chân digital dùng để đọc hoặc xuất tín hiệu. Chúng chỉ có 2 mức điện áp là 0V và 5V với dòng vào/ra tối đa trên mỗi chân là 40mA. Ở mỗi chân đều có các điện trở pull-up từ được cài đặt ngay trong vi điều khiển ATmega328 (mặc định thì các điện trở này không được kết nối).
Các chức năng khác
Arduino Uno R3 là một bảng mạch vi điều khiển nguồn mở dựa trên vi điều khiển Microchip ATmega328 được phát triển bởi Arduino.cc. Bảng mạch được trang bị các bộ chân đầu vào/ đầu ra Digital và Analog có thể giao tiếp với các bảng mạch mở rộng khác nhau. Mạch Arduino Uno thích hợp cho những bạn mới tiếp cận và đam mê về điện tử, lập trình…Dựa trên nền tảng mở do Arduino.cc cung cấp các bạn dễ dàng xây dựng cho mình một dự án nhanh nhất ( lập trình Robot, xe tự hành, điều khiển bật tắt led…). 

b. Chức năng của Arduino R3:
- 2 chân Serial: 0 (RX) và 1 (TX): dùng để gửi (transmit – TX) và nhận (receive – RX) dữ liệu TTL Serial. Arduino Uno có thể giao tiếp với thiết bị khác thông qua 2 chân này. Kết nối bluetooth thường thấy nói nôm na chính là kết nối Serial không dây. Nếu không cần giao tiếp Serial, bạn không nên sử dụng 2 chân này nếu không cần thiết
- Chân PWM (~): 3, 5, 6, 9, 10, và 11: cho phép bạn xuất ra xung PWM với độ phân giải 8bit (giá trị từ 0 → 28-1 tương ứng với 0V → 5V) bằng hàm analogWrite(). Nói một cách đơn giản, bạn có thể điều chỉnh được điện áp ra ở chân này từ mức 0V đến 5V thay vì chỉ cố định ở mức 0V và 5V như những chân khác.
Các chức năng khác
- Chân giao tiếp SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Ngoài các chức năng thông thường, 4 chân này còn dùng để truyền phát dữ liệu bằng giao thức SPI với các thiết bị khác.
- LED 13: trên Arduino UNO có 1 đèn led màu cam (kí hiệu chữ L). Khi bấm nút Reset, bạn sẽ thấy đèn này nhấp nháy để báo hiệu. Nó được nối với chân số 13. Khi chân này được người dùng sử dụng, LED sẽ sáng.
- Arduino Uno R3 có 6 chân analog (A0 → A5) cung cấp độ phân giải tín hiệu 10bit (0 → 210-1) để đọc giá trị điện áp trong khoảng 0V → 5V. Với chân AREF trên board, bạn có thể để đưa vào điện áp tham chiếu khi sử dụng các chân analog. Tức là nếu bạn cấp điện áp 2.5V vào chân này thì bạn có thể dùng các chân analog để đo điện áp trong khoảng từ 0V → 2.5V với độ phân giải vẫn là 10bit. Đặc biệt, Arduino UNO có 2 chân A4 (SDA) và A5 (SCL) hỗ trợ giao tiếp I2C/TWI với các thiết bị khác.
c.Thông số kỹ thuật Arduino Uno R3 (Dip)
| Datasheets | Atmega328 |
| Standard Package | 27 |
| Category | Integrated Circuits (ICs) |
| Family | Embedded – Atmel |
| Series | Atmega |
| Packaging | Tube |
| Core Processor | AVR |
| Core Size | 8-Bit |
| Speed | 16MHz |
| Connectivity | I²C, SPI, UART / USART, USB |
| Peripherals | Brown-out Detec t/ Reset, HLVD, POR, PWM, WDT |
| Number of I /O | 14 |
| Program Memory Size | 32KB |
| Program Memory Type | FLASH |
| EEPROM Size | 1KB |
| RAM Size | 2K |
| Voltage – Supply (Vcc/Vdd) | 4.2 V ~ 5.5 V |
| Data Converters | A/D 6 x 10bit |
| Oscillator Type | Internal |
| Operating Temperature | -40°C ~ 85°C |
| Package / Case | 28-SOIC (0.295″, 7.50mm Width) |
| Other Names | Atmega328 |
d. Power
- LED: Có 1 LED được tích hợp trên bảng mạch và được nối vào chân D13. Khi chân có giá trị mức cao (HIGH) thì LED sẽ sáng và LED tắt khi ở mức thấp (LOW).
- VIN: Chân này dùng để cấp nguồn ngoài (điện áp cấp từ 7-12VDC).
- 5V: Điện áp ra 5V (dòng điện trên mỗi chân này tối đa là 500mA).
- 3V3: Điện áp ra 3.3V (dòng điện trên mỗi chân này tối đa là 50mA).
- GND: Là chân mang điện cực âm trên board.
- IOREF: Điệp áp hoạt động của vi điều khiển trên Arduino UNO và có thể đọc điện áp trên chân IOREF. Chân IOREF không dùng để làm chân cấp nguồn.
e.Bộ nhớ
Vi điều khiển ATmega328:- 32 KB bộ nhớ Plash: trong đó bootloader chiếm 0.5KB.
- 2 KB cho SRAM: (Static Random Access Menory): giá trị các biến khai báo sẽ được lưu ở đây. Khai báo càng nhiều biến thì càng tốn nhiều bộ nhớ RAM. Khi mất nguồn dữ liệu trên SRAM sẽ bị mất.
- 1 KB cho EEPROM: (Electrically Eraseble Programmable Read Only Memory): Là nơi có thể đọc và ghi dữ liệu vào đây và không bị mất dữ liệu khi mất nguồn.
f. Các chân đầu vào và đầu ra
Trên Board Arduino Uno có 14 chân Digital được sử dụng để làm chân đầu vào và đầu ra và chúng sử dụng các hàm pinMode(), digitalWrite(), digitalRead(). Giá trị điện áp trên mỗi chân là 5V, dòng trên mỗi chân là 20mA và bên trong có điện trở kéo lên là 20-50 ohm. Dòng tối đa trên mỗi chân I/O không vượt quá 40mA để tránh trường hợp gây hỏng board mạch. Ngoài ra, một số chân Digital có chức năng đặt biệt:- Serial: 0 (RX) và 1 (TX): Được sử dụng để nhận dữ liệu (RX) và truyền dữ liệu (TX) TTL.
- Ngắt ngoài: Chân 2 và 3.
- PWM: 3, 5, 6, 9 và 11 Cung cấp đầu ra xung PWM với độ phân giải 8 bit bằng hàm analogWrite ().
- SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Các chân này hỗ trợ giao tiếp SPI bằng thư viện SPI.
- LED: Có 1 LED được tích hợp trên bảng mạch và được nối vào chân D13. Khi chân có giá trị mức cao (HIGH) thì LED sẽ sáng và LED tắt khi ở mức thấp (LOW).
- TWI/I2C: A4 (SDA) và A5 (SCL) hỗ trợ giao tiếp I2C/TWI với các thiết bị khác.
1.2 Module thẻ từ RFID giao tiếp Arduino khóa cửa bằng thẻ từ
a. Giới thiệu thẻ từ rfid
Module RFID RC522 NFC 13.56mhz dùng để đọc và ghi dữ liệu cho thẻ NFC tần số 13.56mhz. Với mức thiết kế nhỏ gọn, linh hoạt module này là sự lựa chọn thích hợp cho các ứng dụng đọc – ghi thẻ NFC, đặc biệt khi sử dụng kết hợp với ARDUINO. RFID – Radio Frequency Identification Detection là công nghệ nhận dạng đối tượng bằng sóng vô tuyến. Là một phương pháp nhận dạng tự động dựa trên việc lưu trữ dữ liệu từ xa, sử dụng thiết bị Thẻ RFID và một Đầu đọc RFID.

b. Thông số kỹ thuật thẻ từ rfid
- Nguồn: 3.3VDC, 13 – 26mA
- Dòng ở chế độ chờ: 10-13mA
- Dòng ở chế độ nghỉ: <80uA
- Tải tối đa: 30mA
- Tần số sóng mang: 13.56MHz
- Khoảng cách hoạt động: 0~60mm(mifare1 card)
- Giao tiếp: SPI
- Tốc độ truyền dữ liệu: tối đa 10Mbit/s
- Các loại card RFID hỗ trợ: mifare1 S50, mifare1 S70, mifare UltraLight, mifare Pro, mifare Desfire
- Kích thước: 40mm × 60mm
- Nhiệt độ hoạt động: -20 đến 80 ° C
- Độ ẩm hoạt động: 5% -95%
- Phụ kiện: móc khóa và thẻ.
- Có khả năng đọc và ghi
- Hỗ trợ: ISO / IEC 14443A /MIFAR
c. Chức năng các chân thẻ từ rfid
- SDA(SS) chân chọn lọc chip khi giao thiệp SPI (kích hoạt mức thấp).
- SCK :chân xung trong chế độ SPI.
- MOSI(SDI): Master Data Out – Slave In trong chế độ giao thiệp SPI.
- MISO(SDO): Master Data In – Slave Out trong chế độ giao thiệp SPI.
- IRQ : chân ngắt.
- GND : chân nối mass.
- RST : chân reset lại module.
- VCC : nguồn 3.3V.
d. Tính năng thẻ từ rfid
- MF RC522 vận dụng cho việc tích hợp cao việc đọc và viết dữ liệu.
- Giao tiếp với thẻ tại tần số 13.56Mhz.
- Là sự chọn lọc thấp cho sự lớn mạnh của những trang bị sáng tạo và trang bị di động cầm tay.
- MF RC552 dùng cho việc tăng điều chế và giải mã điều chế thông báo giao du thụ động bằng những bí quyết hoàn toàn phù hợp trong tần số 13.56Mhz .
- tương thích sở hữu bộ phát dấu hiệu 14443A.
- ISO 14443A xử lý kỹ thuật để phát hiện lỗi và những sườn hình.
- CRYPTO1 mau chóng tương trợ mã hóa thuật toán để công nhận sản phẩm là mafire.
- MF RC552 tương trợ mafire giao tiếp có các chuỗi bằng tốc độ cao,tốc độ truyền dữ liệu hai chiều lên tới 424kbit/s.
- MF RC552 cũng như vậy như MF RC500,MF RC530 nhưng cũng có các đặc điểm và sự khác biệt,giao tiếp giữa nó và máy chủ ở chế độ SPI giúp giảm thiểu các kết nối hạn hẹp của PCB,giảm mức giá đáng nhắc.
- Những MF 552 là những module được ngoài mặt để dể dàng sử dụng mang các đầu đọc thẻ mạch.
- Nâng cao sự tăng trưởng của các vận dụng ,đáp ứng nhu cầu về sử dụng các trang bị đầu/cuối tiêu dùng thẻ nhớ RF.
- Module này với thể được nạp trược tiếp vào những khuôn reader khác nhau,rất thuận tiện.
e. Ứng dụng thẻ từ rfid
- Ứng dụng quản lý lưu thông hàng hóa
- Ứng dụng quản lý kho hàng
- Ứng dụng quản lý thu phí đường bộ tự động
- Ngoài ra còn các ứng dụng như: quản lý nhà máy, quản lý thư viện, quản lý chấm công, quản lý bãi giữ xe, quản lý nhà ăn, quản lý sinh viên, quản lý bệnh viện, khóa cửa
1.3 LCD1602 cho mạch thẻ từ RFID giao tiếp Arduino khóa cửa bằng thẻ từ
a. Giới thiệu
b. Thông số kỹ thuật
- Điện áp hoạt động là 5 V.
- Kích thước: 80 x 36 x 12.5 mm
- Chữ đen, nền xanh lá
- Khoảng cách giữa hai chân kết nối là 0.1 inch tiện dụng khi kết nối với Breadboard.
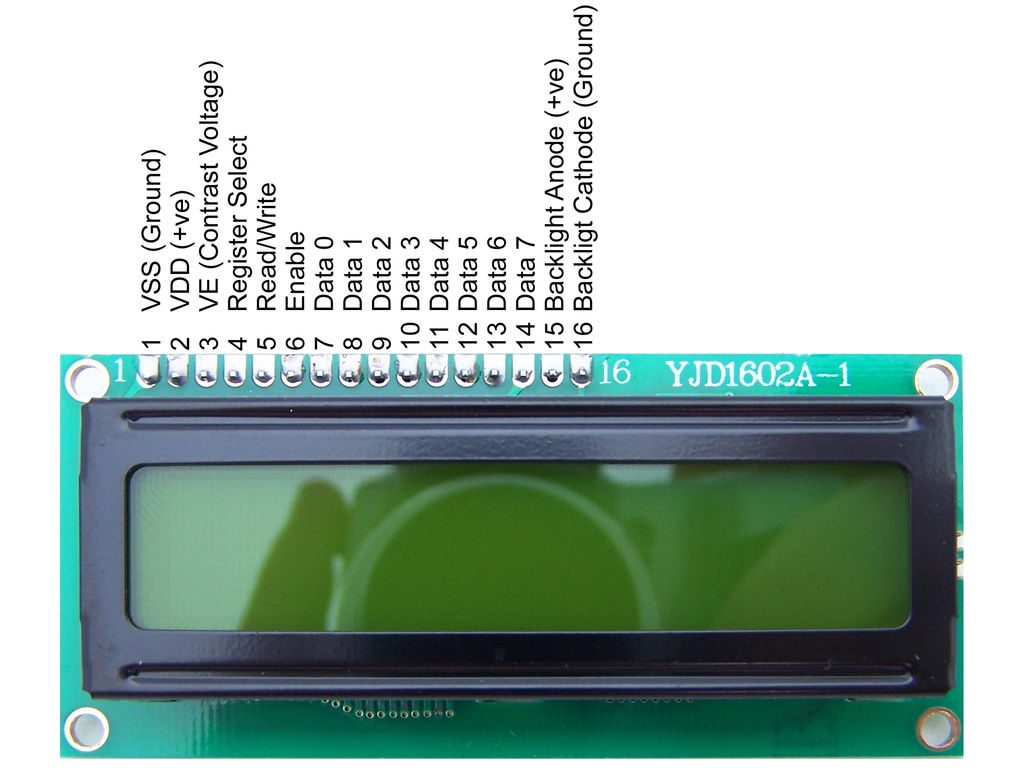
- Tên các chân được ghi ở mặt sau của màn hình LCD hổ trợ việc kết nối, đi dây điện.
- Có đèn led nền, có thể dùng biến trở hoặc PWM điều chình độ sáng để sử dụng ít điện năng hơn.
- Có thể được điều khiển với 6 dây tín hiệu
- Có bộ ký tự được xây dựng hổ trợ tiếng Anh và tiếng Nhật, xem thêm HD44780 datasheet để biết thêm chi tiết.
c. Sơ đồ chân LCD 16×2
| Số chân | Ký hiệu chân | Mô tả chân |
| 1 | Vss | Cấp điện 0v |
| 2 | Vcc | Cấp điện 5v |
| 3 | V0 | Chỉnh độ tương phản |
| 4 | RS | Lựa chọn thanh ghi địa chỉ hay dữ liệu |
| 5 | RW | Lựa chọn thanh ghi Đọc hay Viết |
| 6 | EN | Cho phép xuất dữ liệu |
| 7 | D0 | Đường truyền dữ liệu 0 |
| 8 | D1 | Đường truyền dữ liệu 1 |
| 9 | D2 | Đường truyền dữ liệu 2 |
| 10 | D3 | Đường truyền dữ liệu 3 |
| 11 | D4 | Đường truyền dữ liệu 4 |
| 12 | D5 | Đường truyền dữ liệu 5 |
| 13 | D6 | Đường truyền dữ liệu 6 |
| 14 | D7 | Đường truyền dữ liệu 7 |
| 15 | A | Chân dương đèn màn hình |
| 16 | K | Chân âm đèn màn hình |
Trong 16 chân của LCD được chia ra làm 3 dạng tín hiệu như sau:
- Các chân cấp nguồn: Chân số 1 là chân nối mass (0V), chân thứ 2 là Vdd nối với nguồn+5V. Chân thứ 3 dùng để chỉnh contrast thường nối với biến trở.
- Các chân điều khiển: Chân số 4 là chân RS dùng để điều khiển lựa chọn thanh ghi. ChânR/W dùng để điều khiển quá trình đọc và ghi. Chân E là chân cho phép dạng xung chốt.
- Các chân dữ liệu D7÷D0: Chân số 7 đến chân số 14 là 8 chân dùng để trao đổi dữ liệu giữa thiết bị điều khiển và LCD.
d. Địa chỉ ba vùng nhớ
- Bộ điều khiển LCD có ba vùng nhớ nội, mỗi vùng có chức năng riêng. Bộ điều khiển phải khởi động trước khi truy cập bất kỳ vùng nhớ nào. a. Bộ nhớ DDRAM
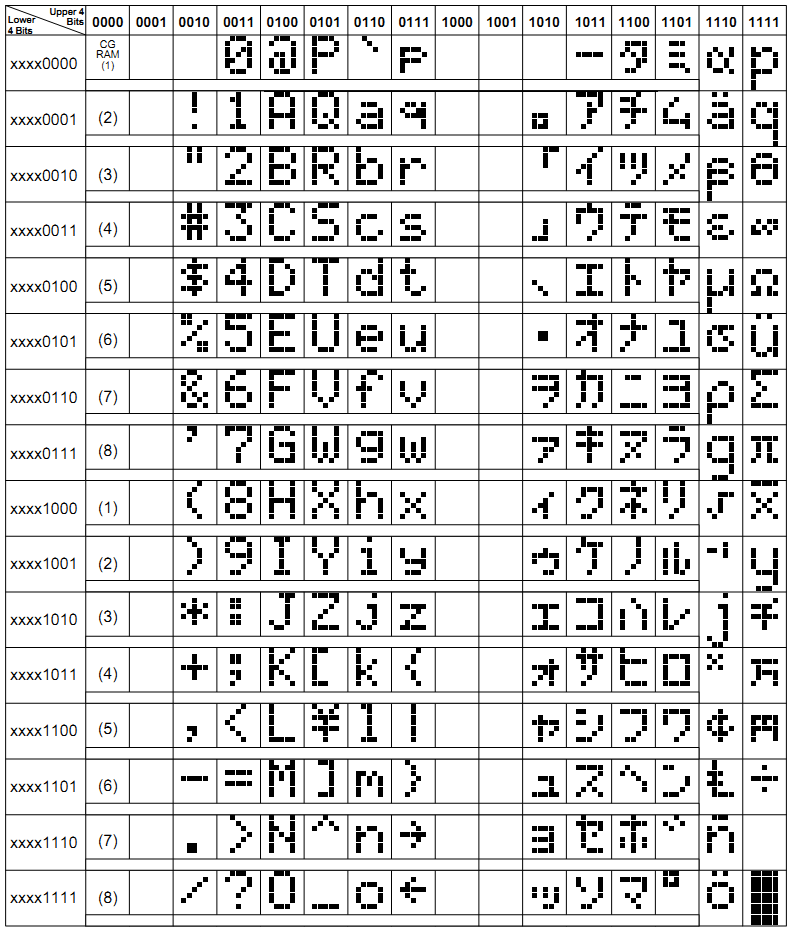
- Bộ nhớ chứa dữ liệu để hiển thị (Display Data RAM: DDRAM) lưu trữ những mã ký tự để hiển thị lên màn hình. Mã ký tự lưu trữ trong vùng DDRAM sẽ tham chiếu với từng bitmap kí tự được lưu trữ trong CGROM đã được định nghĩa trước hoặc đặt trong vùng do người sử dụng định nghĩa. b. Bộ phát kí tự ROM – CGROM
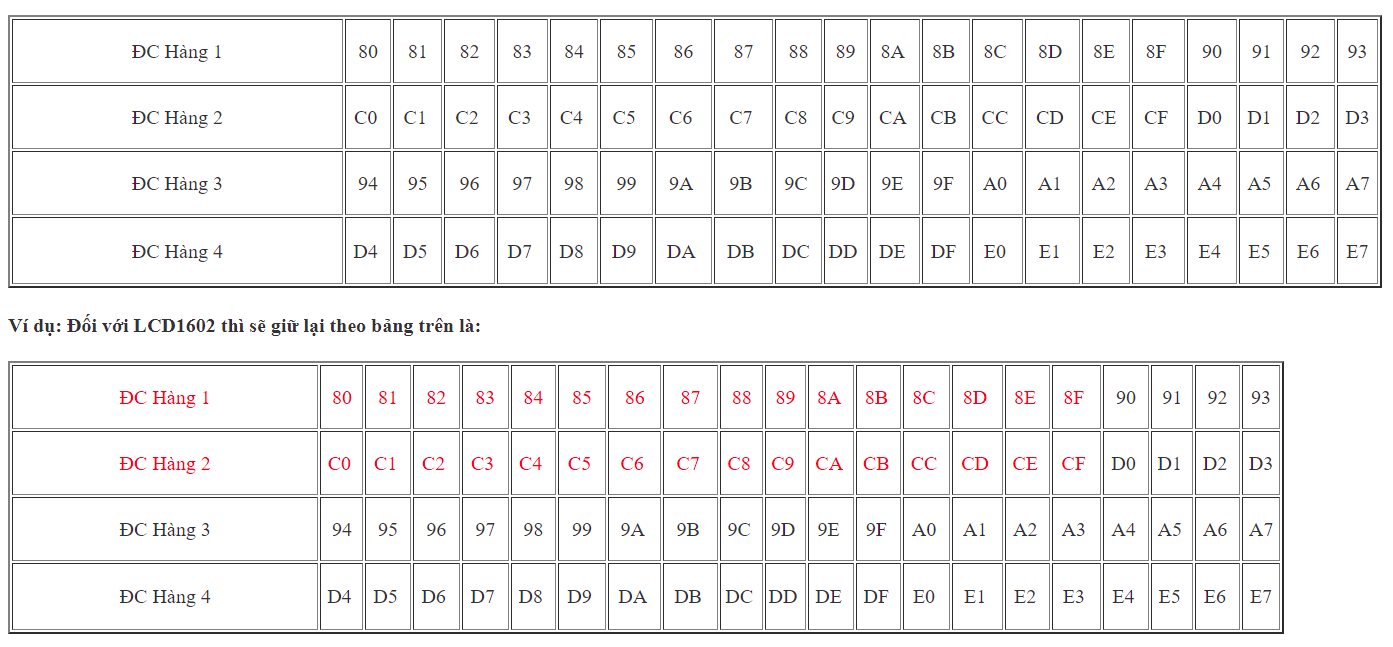
- Bộ phát kí tự ROM (Character Generator ROM: CGROM) chứa các kiểu bitmap cho mỗi kí tự được định nghĩa trước mà LCD có thể hiển thị, như được trình bày bảng mã ASCII. Mã kí tự lưu trong DDRAM cho mỗi vùng kí tự sẽ được tham chiếu đến một vị trí trong CGROM. Ví dụ: mã kí tự số hex 0x53 lưu trong DDRAM được chuyển sang dạng nhị phân 4 bit cao là DB[7:4] = “0101” và 4 bit thấp là DB[3:0] = “0011” chính là kí tự chữ ‘S’ sẽ hiển thị trên màn hình LCD. c. Bộ phát kí tự RAM – CGRAM
- Bộ phát kí tự RAM (Character Generator RAM: CG RAM) cung cấp vùng nhớ để tạo ra 8 kí tự tùy ý. Mỗi kí tự gồm 5 cột và 8 hàng.
e. Các lệnh điều khiển của LCD
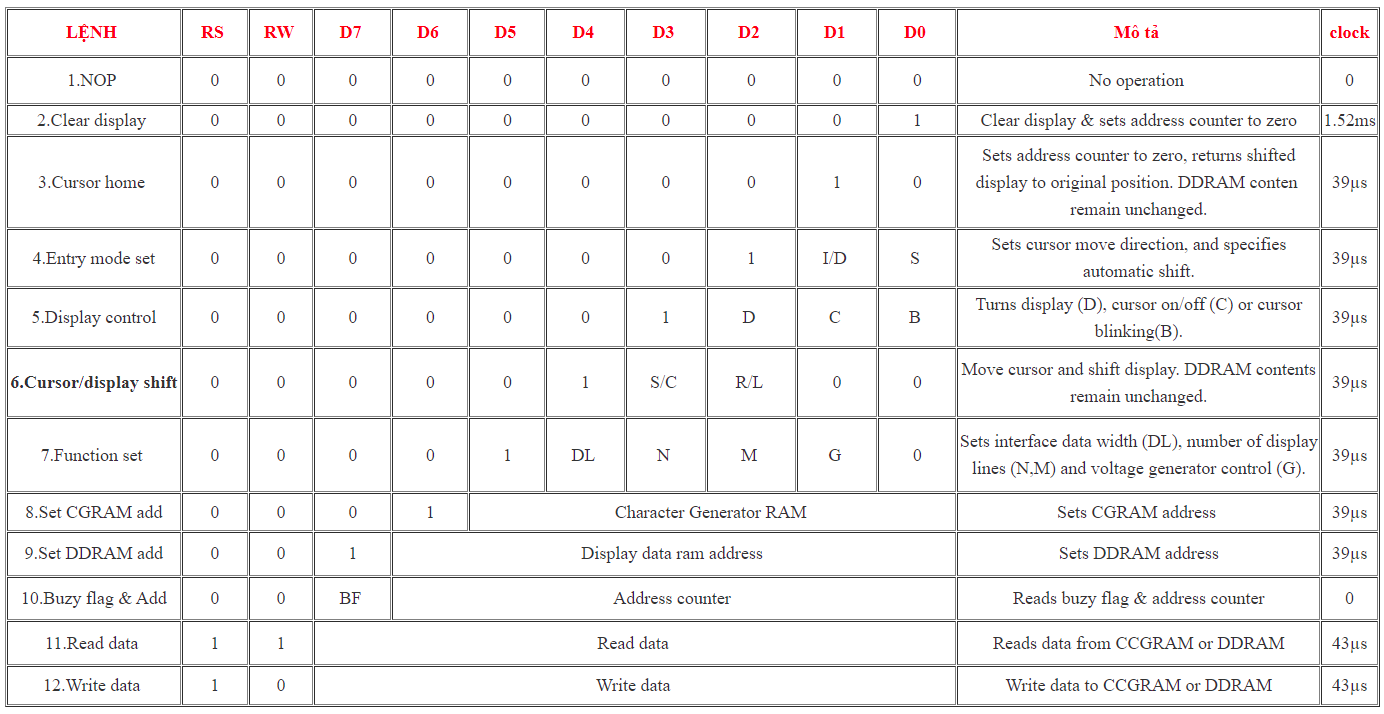
- Lệnh thiết lập chức năng giao tiếp “Function set”:
- Bit DL (data length) = 1 thì cho phép giao tiếp 8 đường data D7 ÷ D0, nếu bằng 0 thì cho phép giao tiếp 4 đường D7 ÷ D4.
- Bit N (number of line) = 1 thì cho phép hiển thị 2 hàng, nếu bằng 0 thì cho phép hiển thị 1 hàng.
- Bit F (font) = 1 thì cho phép hiển thị với ma trận 5×8, nếu bằng 0 thì cho phép hiển thị với ma trận 5×11.
- Các bit cao còn lại là hằng số không đổi.
Lệnh xoá màn hình “Clear Display”: khi thực hiện lệnh này thì LCD sẽ bị xoá và bộ đếm địa chỉ được xoá về 0.
- Lệnh di chuyển con trỏ về đầu màn hình “Cursor Home”: khi thực hiện lệnh này thì bộ đếm địa chỉ được xoá về 0, phần hiển thị trở về vị trí gốc đã bị dịch trước đó. Nội dung bộ nhớ RAM hiển thị DDRAM không bị thay đổi.
- Lệnh thiết lập lối vào “Entry mode set”: lệnh này dùng để thiết lập lối vào cho các kí tự hiển thị,
- Bit I/D = 1 thì con trỏ tự động tăng lên 1 mỗi khi có 1 byte dữ liệu ghi vào bộ hiển thị, khi I/D = 0 thì con trỏ sẽ tự động giảm đi 1 mỗi khi có 1 byte dữ liệu ghi vào bộ hiển thị.
- Bit S = 1 thì cho phép dịch chuyển dữ liệu mỗi khi nhận 1 byte hiển thị.
Lệnh điều khiển con trỏ hiển thị “Display Control”:
- Bit D: cho phép LCD hiển thị thì D = 1, không cho hiển thị thì bit D = 0.
- Bit C: cho phép con trỏ hiển thị thì C= 1, không cho hiển thị con trỏ thì bit C = 0.
- Bit B: cho phép con trỏ nhấp nháy thì B= 1, không cho con trỏ nhấp nháy thì bit B = 0.
- Với các bit như trên thì để hiển thị phải cho D = 1, 2 bit còn lại thì tùy chọn, trong thư viện thì cho 2 bit đều bằng 0, không cho phép mở con trỏ và nhấp nháy, nếu bạn không thích thì hiệu chỉnh lại.
- Lệnh di chuyển con trỏ “Cursor /Display Shift”: lệnh này dùng để điều khiển di chuyển con trỏ hiển thị dịch chuyển
- Bit SC: SC = 1 cho phép dịch chuyển, SC = 0 thì không cho phép.
- Bit RL xác định hướng dịch chuyển: RL = 1 thì dịch phải, RL = 0 thì dịch trái. Nội dung bộ nhớ DDRAM vẫn không đổi.
- Vậy khi cho phép dịch thì có 2 tùy chọn: dịch trái và dịch phải.
- Lệnh thiết lập địa chỉ cho bộ nhớ RAM phát kí tự “Set CGRAM Addr”: lệnh này dùng để thiết lập địa chỉ cho bộ nhớ RAM phát kí tự.
- Lệnh thiết lập địa chỉ cho bộ nhớ RAM hiển thị “Set DDRAM Addr”: lệnh này dùng để thiết lập địa chỉ cho bộ nhớ RAM lưu trữ các dữ liệu hiển thị.
- Hai lệnh cuối cùng là lệnh đọc và lệnh ghi dữ liệu LCD.
f. Bảng mã ASCII sử dụng cho LCD
g. Bảng địa chỉ cho LCD
1.4 Động cơ servo trong mạch thẻ từ RFID giao tiếp Arduino khóa số bằng thẻ từ
a. Giới thiệu
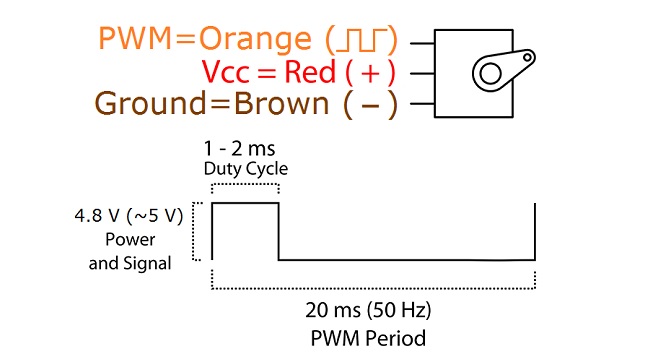
Động cơ RC Servo 9G có kích thước nhỏ, là loại được sử dụng nhiều nhất để làm các mô hình nhỏ hoặc các cơ cấu kéo không cần đến lực nặng. Động cơ RC Servo 9G có tốc độ phản ứng nhanh, các bánh răng được làm bằng nhựa nên cần lưu ý khi nâng tải nặng vì có thể làm hư bánh răng, động cơ RC Servo 9G có tích hợp sẵn Driver điều khiển động cơ bên trong nên có thể dễ dàng điều khiển góc quay bằng phương pháp điều độ rộng xung PWM.

b. Thông số kỹ thuật
- Điện áp hoạt động: 4.8-5VDC
- Tốc độ: 0.12 sec/ 60 degrees (4.8VDC)
- Lực kéo: 1.6KG.CM
- Kích thước: 21x12x22mm
- Trọng lượng: 9g.
c. Dạng sóng

1.5 Loa 5V cho đề tài đọc thẻ từ RFID giao tiếp Arduino giao tiếp Pic16F
a. Giới thiệu
Còi Buzzer 5VDC có tuổi thọ cao, hiệu suất ổn định, chất lượng tốt, được sản xuất nhỏ gọn phù hợp thiết kế với các mạch còi buzzer nhỏ gọn, mạch báo động.

b. Thông số kỹ thuật
- Nguồn : 3.5V – 5.5V
- Dòng điện tiêu thụ: <25mA
- Tần số cộng hưởng: 2300Hz ± 500Hz
- Biên độ âm thanh: >80 dB
- Nhiệt độ hoạt động:-20 °C đến +70 °C
- Kích thước : Đường kính 12mm, cao 9,7mm
2. Hướng dẫn đồ án thẻ từ RFID giao tiếp Arduino khóa cửa bằng Servo
Phần này chưa được chia sẻ.
LIÊN HỆ thông tin ở TẠI ĐÂY để được hổ trợ tốt hơn.
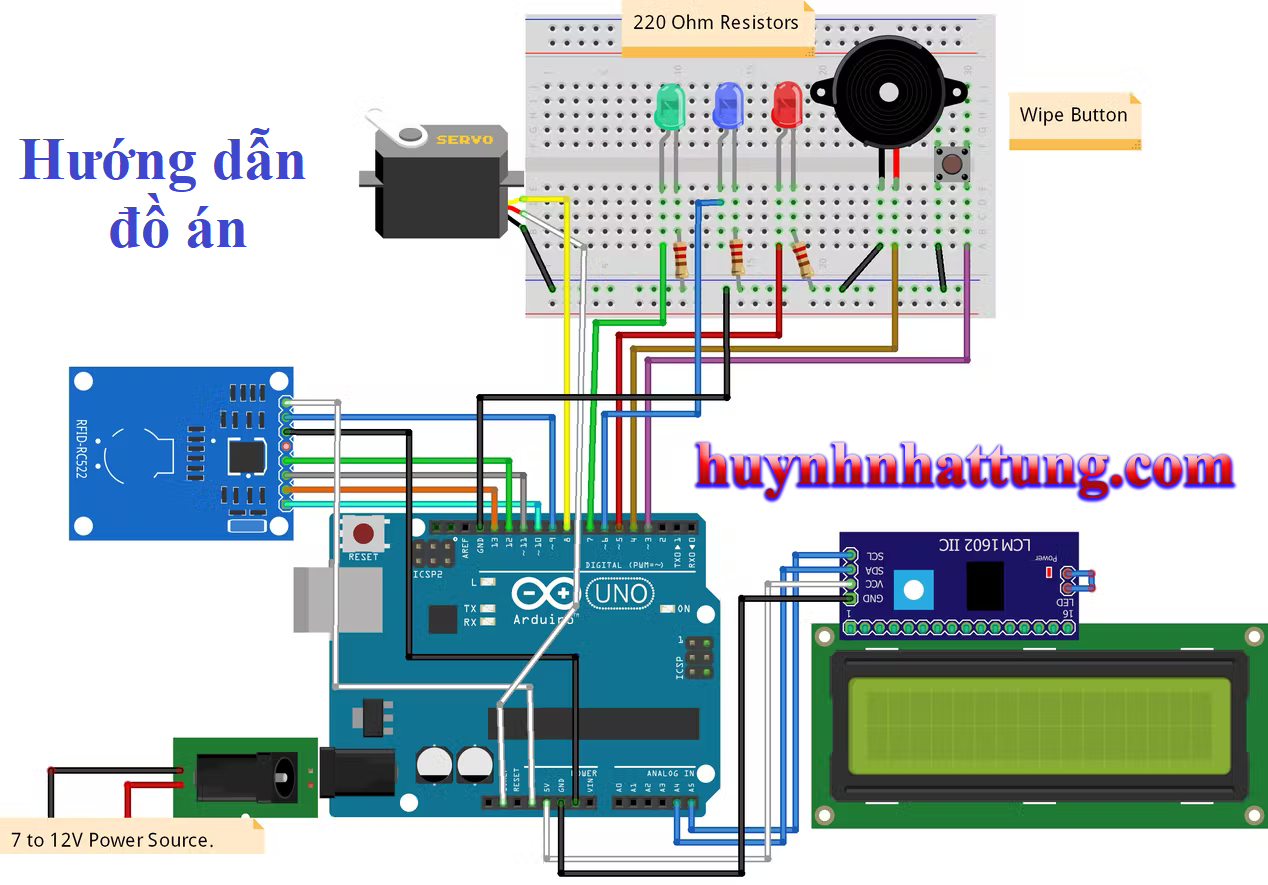
Phần cứng
Phần mềm
#include <EEPROM.h> // We are going to read and write Tag's UIDs from/to EEPROM #include <MFRC522.h> #include <LiquidCrystal_I2C.h> #include <Servo.h> #include <SPI.h> #include <Wire.h> // Create instances MFRC522 mfrc522(10, 9); // MFRC522 mfrc522(SS_PIN, RST_PIN) LiquidCrystal_I2C lcd(0x27, 16, 2); Servo myServo; // create servo object to control a servo // Set Pins for led's, servo, buzzer and wipe button constexpr uint8_t greenLed = 7; constexpr uint8_t blueLed = 6; constexpr uint8_t redLed = 5; constexpr uint8_t ServoPin = 8; constexpr uint8_t BuzzerPin = 4; constexpr uint8_t wipeB = 3; // Button pin for WipeMode boolean match = false; // initialize card match to false boolean programMode = false; // initialize programming mode to false boolean replaceMaster = false; uint8_t successRead; // Variable integer to keep if we have Successful Read from Reader byte storedCard[4]; // Stores an ID read from EEPROM byte readCard[4]; // Stores scanned ID read from RFID Module byte masterCard[4]; // Stores master card's ID read from EEPROM ///////////////////////////////////////// Setup /////////////////////////////////// void setup() { //Arduino Pin Configuration pinMode(redLed, OUTPUT); pinMode(greenLed, OUTPUT); pinMode(blueLed, OUTPUT); pinMode(BuzzerPin, OUTPUT); pinMode(wipeB, INPUT_PULLUP); // Enable pin's pull up resistor // Make sure led's are off digitalWrite(redLed, LOW); digitalWrite(greenLed, LOW); digitalWrite(blueLed, LOW); //Protocol Configuration lcd.begin(); // initialize the LCD lcd.backlight(); SPI.begin(); // MFRC522 Hardware uses SPI protocol mfrc522.PCD_Init(); // Initialize MFRC522 Hardware myServo.attach(ServoPin); // attaches the servo on pin 8 to the servo object myServo.write(10); // Initial Position //If you set Antenna Gain to Max it will increase reading distance //mfrc522.PCD_SetAntennaGain(mfrc522.RxGain_max); ShowReaderDetails(); // Show details of PCD - MFRC522 Card Reader details //Wipe Code - If the Button (wipeB) Pressed while setup run (powered on) it wipes EEPROM if (digitalRead(wipeB) == LOW) { // when button pressed pin should get low, button connected to ground digitalWrite(redLed, HIGH); // Red Led stays on to inform user we are going to wipe lcd.setCursor(0, 0); lcd.print("Button Pressed"); digitalWrite(BuzzerPin, HIGH); delay(1000); digitalWrite(BuzzerPin, LOW); lcd.clear(); lcd.setCursor(0, 0); lcd.print("This will remove"); lcd.setCursor(0, 1); lcd.print("all records"); delay(2000); lcd.clear(); lcd.setCursor(0, 0); lcd.print("You have 10 "); lcd.setCursor(0, 1); lcd.print("secs to Cancel"); delay(2000); lcd.clear(); lcd.setCursor(0, 0); lcd.print("Unpres to cancel"); lcd.setCursor(0, 1); lcd.print("Counting: "); bool buttonState = monitorWipeButton(10000); // Give user enough time to cancel operation if (buttonState == true && digitalRead(wipeB) == LOW) { // If button still be pressed, wipe EEPROM lcd.print("Wiping EEPROM..."); for (uint16_t x = 0; x < EEPROM.length(); x = x + 1) { //Loop end of EEPROM address if (EEPROM.read(x) == 0) { //If EEPROM address 0 // do nothing, already clear, go to the next address in order to save time and reduce writes to EEPROM } else { EEPROM.write(x, 0); // if not write 0 to clear, it takes 3.3mS } } lcd.clear(); lcd.setCursor(0, 0); lcd.print("Wiping Done"); // visualize a successful wipe digitalWrite(redLed, LOW); digitalWrite(BuzzerPin, HIGH); delay(200); digitalWrite(redLed, HIGH); digitalWrite(BuzzerPin, LOW); delay(200); digitalWrite(redLed, LOW); digitalWrite(BuzzerPin, HIGH); delay(200); digitalWrite(redLed, HIGH); digitalWrite(BuzzerPin, LOW); delay(200); digitalWrite(redLed, LOW); } else { lcd.clear(); lcd.setCursor(0, 0); lcd.print("Wiping Cancelled"); // Show some feedback that the wipe button did not pressed for 10 seconds digitalWrite(redLed, LOW); } } // Check if master card defined, if not let user choose a master card // This also useful to just redefine the Master Card // You can keep other EEPROM records just write other than 143 to EEPROM address 1 // EEPROM address 1 should hold magical number which is '143' if (EEPROM.read(1) != 143) { lcd.clear(); lcd.setCursor(0, 0); lcd.print("No Master Card "); lcd.setCursor(0, 1); lcd.print("Defined"); delay(2000); lcd.setCursor(0, 0); lcd.print("Scan A Tag to "); lcd.setCursor(0, 1); lcd.print("Define as Master"); do { successRead = getID(); // sets successRead to 1 when we get read from reader otherwise 0 // Visualize Master Card need to be defined digitalWrite(blueLed, HIGH); digitalWrite(BuzzerPin, HIGH); delay(200); digitalWrite(BuzzerPin, LOW); digitalWrite(blueLed, LOW); delay(200); } while (!successRead); // Program will not go further while you not get a successful read for ( uint8_t j = 0; j < 4; j++ ) { // Loop 4 times EEPROM.write( 2 + j, readCard[j] ); // Write scanned Tag's UID to EEPROM, start from address 3 } EEPROM.write(1, 143); // Write to EEPROM we defined Master Card. lcd.clear(); lcd.setCursor(0, 0); lcd.print("Master Defined"); delay(2000); } for ( uint8_t i = 0; i < 4; i++ ) { // Read Master Card's UID from EEPROM masterCard[i] = EEPROM.read(2 + i); // Write it to masterCard } ShowOnLCD(); // Print data on LCD cycleLeds(); // Everything ready lets give user some feedback by cycling leds } ///////////////////////////////////////// Main Loop /////////////////////////////////// void loop () { do { successRead = getID(); // sets successRead to 1 when we get read from reader otherwise 0 if (programMode) { cycleLeds(); // Program Mode cycles through Red Green Blue waiting to read a new card } else { normalModeOn(); // Normal mode, blue Power LED is on, all others are off } } while (!successRead); //the program will not go further while you are not getting a successful read if (programMode) { if ( isMaster(readCard) ) { //When in program mode check First If master card scanned again to exit program mode lcd.clear(); lcd.setCursor(0, 0); lcd.print("Exiting Program Mode"); digitalWrite(BuzzerPin, HIGH); delay(1000); digitalWrite(BuzzerPin, LOW); ShowOnLCD(); programMode = false; return; } else { if ( findID(readCard) ) { // If scanned card is known delete it lcd.clear(); lcd.setCursor(0, 0); lcd.print("Already there"); deleteID(readCard); lcd.clear(); lcd.setCursor(0, 0); lcd.print("Tag to ADD/REM"); lcd.setCursor(0, 1); lcd.print("Master to Exit"); } else { // If scanned card is not known add it lcd.clear(); lcd.setCursor(0, 0); lcd.print("New Tag,adding..."); writeID(readCard); lcd.clear(); lcd.setCursor(0, 0); lcd.print("Scan to ADD/REM"); lcd.setCursor(0, 1); lcd.print("Master to Exit"); } } } else { if ( isMaster(readCard)) { // If scanned card's ID matches Master Card's ID - enter program mode programMode = true; lcd.clear(); lcd.setCursor(0, 0); lcd.print("Program Mode"); uint8_t count = EEPROM.read(0); // Read the first Byte of EEPROM that stores the number of ID's in EEPROM lcd.setCursor(0, 1); lcd.print("I have "); lcd.print(count); lcd.print(" records"); digitalWrite(BuzzerPin, HIGH); delay(2000); digitalWrite(BuzzerPin, LOW); lcd.clear(); lcd.setCursor(0, 0); lcd.print("Scan a Tag to "); lcd.setCursor(0, 1); lcd.print("ADD/REMOVE"); } else { if ( findID(readCard) ) { // If not, see if the card is in the EEPROM lcd.clear(); lcd.setCursor(0, 0); lcd.print("Access Granted"); granted(); // Open the door lock myServo.write(10); ShowOnLCD(); } else { // If not, show that the Access is denied lcd.clear(); lcd.setCursor(0, 0); lcd.print("Access Denied"); denied(); ShowOnLCD(); } } } } ///////////////////////////////////////// Access Granted /////////////////////////////////// void granted () { digitalWrite(blueLed, LOW); // Turn off blue LED digitalWrite(redLed, LOW); // Turn off red LED digitalWrite(greenLed, HIGH); // Turn on green LED myServo.write(90); delay(1000); } ///////////////////////////////////////// Access Denied /////////////////////////////////// void denied() { digitalWrite(greenLed, LOW); // Make sure green LED is off digitalWrite(blueLed, LOW); // Make sure blue LED is off digitalWrite(redLed, HIGH); // Turn on red LED digitalWrite(BuzzerPin, HIGH); delay(1000); digitalWrite(BuzzerPin, LOW); } ///////////////////////////////////////// Get Tag's UID /////////////////////////////////// uint8_t getID() { // Getting ready for Reading Tags if ( ! mfrc522.PICC_IsNewCardPresent()) { //If a new Tag placed to RFID reader continue return 0; } if ( ! mfrc522.PICC_ReadCardSerial()) { //Since a Tag placed get Serial and continue return 0; } // There are Mifare Tags which have 4 byte or 7 byte UID care if you use 7 byte Tag // I think we should assume every Tag as they have 4 byte UID // Until we support 7 byte Tags for ( uint8_t i = 0; i < 4; i++) { // readCard[i] = mfrc522.uid.uidByte[i]; } mfrc522.PICC_HaltA(); // Stop reading return 1; } /////////////////////// Check if RFID Reader is correctly initialized or not ///////////////////// void ShowReaderDetails() { // Get the MFRC522 software version byte v = mfrc522.PCD_ReadRegister(mfrc522.VersionReg); // When 0x00 or 0xFF is returned, communication probably failed if ((v == 0x00) || (v == 0xFF)) { lcd.setCursor(0, 0); lcd.print("Communication Failure"); lcd.setCursor(0, 1); lcd.print("Check Connections"); digitalWrite(BuzzerPin, HIGH); delay(2000); // Visualize system is halted digitalWrite(greenLed, LOW); // Make sure green LED is off digitalWrite(blueLed, LOW); // Make sure blue LED is off digitalWrite(redLed, HIGH); // Turn on red LED digitalWrite(BuzzerPin, LOW); while (true); // do not go further } } ///////////////////////////////////////// Cycle Leds (Program Mode) /////////////////////////////////// void cycleLeds() { digitalWrite(redLed, LOW); // Make sure red LED is off digitalWrite(greenLed, HIGH); // Make sure green LED is on digitalWrite(blueLed, LOW); // Make sure blue LED is off delay(200); digitalWrite(redLed, LOW); // Make sure red LED is off digitalWrite(greenLed, LOW); // Make sure green LED is off digitalWrite(blueLed, HIGH); // Make sure blue LED is on delay(200); digitalWrite(redLed, HIGH); // Make sure red LED is on digitalWrite(greenLed, LOW); // Make sure green LED is off digitalWrite(blueLed, LOW); // Make sure blue LED is off delay(200); } //////////////////////////////////////// Normal Mode Led /////////////////////////////////// void normalModeOn () { digitalWrite(blueLed, HIGH); // Blue LED ON and ready to read card digitalWrite(redLed, LOW); // Make sure Red LED is off digitalWrite(greenLed, LOW); // Make sure Green LED is off } //////////////////////////////////////// Read an ID from EEPROM ////////////////////////////// void readID( uint8_t number ) { uint8_t start = (number * 4 ) + 2; // Figure out starting position for ( uint8_t i = 0; i < 4; i++ ) { // Loop 4 times to get the 4 Bytes storedCard[i] = EEPROM.read(start + i); // Assign values read from EEPROM to array } } ///////////////////////////////////////// Add ID to EEPROM /////////////////////////////////// void writeID( byte a[] ) { if ( !findID( a ) ) { // Before we write to the EEPROM, check to see if we have seen this card before! uint8_t num = EEPROM.read(0); // Get the numer of used spaces, position 0 stores the number of ID cards uint8_t start = ( num * 4 ) + 6; // Figure out where the next slot starts num++; // Increment the counter by one EEPROM.write( 0, num ); // Write the new count to the counter for ( uint8_t j = 0; j < 4; j++ ) { // Loop 4 times EEPROM.write( start + j, a[j] ); // Write the array values to EEPROM in the right position } BlinkLEDS(greenLed); lcd.setCursor(0, 1); lcd.print("Added"); delay(1000); } else { BlinkLEDS(redLed); lcd.setCursor(0, 0); lcd.print("Failed!"); lcd.setCursor(0, 1); lcd.print("wrong ID or bad EEPROM"); delay(2000); } } ///////////////////////////////////////// Remove ID from EEPROM /////////////////////////////////// void deleteID( byte a[] ) { if ( !findID( a ) ) { // Before we delete from the EEPROM, check to see if we have this card! BlinkLEDS(redLed); // If not lcd.setCursor(0, 0); lcd.print("Failed!"); lcd.setCursor(0, 1); lcd.print("wrong ID or bad EEPROM"); delay(2000); } else { uint8_t num = EEPROM.read(0); // Get the numer of used spaces, position 0 stores the number of ID cards uint8_t slot; // Figure out the slot number of the card uint8_t start; // = ( num * 4 ) + 6; // Figure out where the next slot starts uint8_t looping; // The number of times the loop repeats uint8_t j; uint8_t count = EEPROM.read(0); // Read the first Byte of EEPROM that stores number of cards slot = findIDSLOT( a ); // Figure out the slot number of the card to delete start = (slot * 4) + 2; looping = ((num - slot) * 4); num--; // Decrement the counter by one EEPROM.write( 0, num ); // Write the new count to the counter for ( j = 0; j < looping; j++ ) { // Loop the card shift times EEPROM.write( start + j, EEPROM.read(start + 4 + j)); // Shift the array values to 4 places earlier in the EEPROM } for ( uint8_t k = 0; k < 4; k++ ) { // Shifting loop EEPROM.write( start + j + k, 0); } BlinkLEDS(blueLed); lcd.setCursor(0, 1); lcd.print("Removed"); delay(1000); } } ///////////////////////////////////////// Check Bytes /////////////////////////////////// boolean checkTwo ( byte a[], byte b[] ) { if ( a[0] != 0 ) // Make sure there is something in the array first match = true; // Assume they match at first for ( uint8_t k = 0; k < 4; k++ ) { // Loop 4 times if ( a[k] != b[k] ) // IF a != b then set match = false, one fails, all fail match = false; } if ( match ) { // Check to see if if match is still true return true; // Return true } else { return false; // Return false } } ///////////////////////////////////////// Find Slot /////////////////////////////////// uint8_t findIDSLOT( byte find[] ) { uint8_t count = EEPROM.read(0); // Read the first Byte of EEPROM that for ( uint8_t i = 1; i <= count; i++ ) { // Loop once for each EEPROM entry readID(i); // Read an ID from EEPROM, it is stored in storedCard[4] if ( checkTwo( find, storedCard ) ) { // Check to see if the storedCard read from EEPROM // is the same as the find[] ID card passed return i; // The slot number of the card break; // Stop looking we found it } } } ///////////////////////////////////////// Find ID From EEPROM /////////////////////////////////// boolean findID( byte find[] ) { uint8_t count = EEPROM.read(0); // Read the first Byte of EEPROM that for ( uint8_t i = 1; i <= count; i++ ) { // Loop once for each EEPROM entry readID(i); // Read an ID from EEPROM, it is stored in storedCard[4] if ( checkTwo( find, storedCard ) ) { // Check to see if the storedCard read from EEPROM return true; break; // Stop looking we found it } else { // If not, return false } } return false; } ///////////////////////////////////////// Blink LED's For Indication /////////////////////////////////// void BlinkLEDS(int led) { digitalWrite(blueLed, LOW); // Make sure blue LED is off digitalWrite(redLed, LOW); // Make sure red LED is off digitalWrite(greenLed, LOW); // Make sure green LED is off digitalWrite(BuzzerPin, HIGH); delay(200); digitalWrite(led, HIGH); // Make sure blue LED is on digitalWrite(BuzzerPin, LOW); delay(200); digitalWrite(led, LOW); // Make sure blue LED is off digitalWrite(BuzzerPin, HIGH); delay(200); digitalWrite(led, HIGH); // Make sure blue LED is on digitalWrite(BuzzerPin, LOW); delay(200); digitalWrite(led, LOW); // Make sure blue LED is off digitalWrite(BuzzerPin, HIGH); delay(200); digitalWrite(led, HIGH); // Make sure blue LED is on digitalWrite(BuzzerPin, LOW); delay(200); } ////////////////////// Check readCard IF is masterCard /////////////////////////////////// // Check to see if the ID passed is the master programing card boolean isMaster( byte test[] ) { if ( checkTwo( test, masterCard ) ) return true; else return false; } /////////////////// Counter to check in reset/wipe button is pressed or not ///////////////////// bool monitorWipeButton(uint32_t interval) { unsigned long currentMillis = millis(); // grab current time while (millis() - currentMillis < interval) { int timeSpent = (millis() - currentMillis) / 1000; Serial.println(timeSpent); lcd.setCursor(10, 1); lcd.print(timeSpent); // check on every half a second if (((uint32_t)millis() % 10) == 0) { if (digitalRead(wipeB) != LOW) { return false; } } } return true; } ////////////////////// Print Info on LCD /////////////////////////////////// void ShowOnLCD() { lcd.clear(); lcd.setCursor(0, 0); lcd.print(" Access Control"); lcd.setCursor(0, 1); lcd.print(" Scan a Tag"); }3. Hoạt động của mạch thẻ từ RFID giao tiếp khóa cửa bằng thẻ từ
Khi cấp điện hệ thống hoạt động, vi điều khiển đưa tín hiệu ban đầu cho lcd16x2 hiển thị thông tin người dùng, lúc này vi điều khiển chờ tín hiệu được gửi vào từ module thẻ từ rfid rc522. Khi nhận được tín hiệu vi điều khiển xử lý và gửi giá trị id của thẻ mới nhập ra ngoài màn hình để hiển thị. Đồng thời kiểm tra xem có đúng mã thẻ chủ không nếu đúng thì động cơ servo sẽ mở sau khoảng 3 giây sẽ tự động lại, còn nếu sai cho phép quẹt thẻ từ lại. Nếu sai quá 3 lần thì loa sẽ kêu và không cho quẹt thẻ trong một thời gian nhất định.
4. Cụ thể hoạt động của mạch thẻ từ RFID giao tiếp Arduino khóa cửa bằng thẻ từ:
Chúc các bạn thành công…!!!
Từ khóa » Thư Viện Rfid Cho Arduino
-
Hướng Dẫn Sử Dụng MFRC522 RFID Reader Với Arduino
-
RFID | Cộng đồng Arduino Việt Nam
-
Hướng Dẫn Sử Dụng MFRC522 RFID Reader Với Arduino - KME
-
MFRC522 - Arduino Library List
-
Miguelbalboa/rfid: Arduino RFID Library For MFRC522 - GitHub
-
Kết Nối RFID Với Arduino - Cách đọc Thẻ RFID Bằng Arduino
-
Hướng Dẫn Sử Dụng Module RFID Reader With Cards Kit 13.56MHz
-
Giao Tiếp Giữa Arduino Với Module Ghi đọc Thẻ RFID RC522 - YouTube
-
Module đọc RFID RC522 - Blog Mecsu
-
Hệ Thống Khóa Cửa Thông Minh Sử Dụng RFID RC-522 Và Arduino
-
Hệ Thống đóng Mở Cửa Tự động Dùng RFID Và Arduino
-
Cách Hoạt động Của RFID Và Cách Tạo Khóa Cửa Dựa Trên Arduino
-
Hướng Dẫn Sử Dụng MFRC522 RFID Reader Với Arduino
-
Hướng Dẫn Lập Trình Thẻ RFID (thẻ Từ) Với Arduino - Trần Huỳnh Anh