Vi Phân – Wikipedia Tiếng Việt
Có thể bạn quan tâm
| Một phần của loạt bài về | ||||||
| Vi tích phân | ||||||
|---|---|---|---|---|---|---|
| ||||||
Vi phân
| ||||||
Tích phân
| ||||||
Chuỗi
| ||||||
Vectơ
| ||||||
Nhiều biến
| ||||||
Chuyên ngành
| ||||||
Thuật ngữ
| ||||||
|
Trong toán học, vi phân (tiếng Anh: differential) là một khái niệm và là một nhánh con của vi tích phân[1] liên quan đến nghiên cứu về tốc độ thay đổi của hàm số khi biến số thay đổi. Đây là một trong hai nhánh truyền thống của vi tích phân. Cái còn lại là tích phân, ngược lại với vi phân, liên quan đến cả một quá trình thay đổi của một hàm số nguyên thuỷ (nguyên hàm) hay một thực thể khởi thuỷ phụ thuộc vào biến số khi đã biết tốc độ thay đổi của nó, thường được thể hiện bởi diện tích (thể tích) nằm bên dưới một đường cong (mặt cong).[2]
Các đối tượng nghiên cứu chính trong vi phân là đạo hàm của hàm số, các khái niệm liên quan như vi phân hàm số và các ứng dụng của chúng. Đạo hàm của hàm tại một giá trị đầu vào được chọn mô tả tốc độ thay đổi của hàm gần giá trị đầu vào đó. Về mặt hình học, đạo hàm tại một điểm là độ dốc của đường tiếp tuyến với đồ thị của hàm tại điểm đó, với điều kiện là đạo hàm tồn tại và được xác định tại điểm đó. Đối với hàm có giá trị thực của một biến thực duy nhất, đạo hàm của hàm tại một điểm thường xác định xấp xỉ tuyến tính tốt nhất cho hàm tại điểm đó.
Phép tính vi phân và phép tính tích phân được kết nối bởi định lý cơ bản của vi tích phân, trong đó nêu rõ vi phân là quá trình ngược lại với tích phân.
Vi phân có các ứng dụng cho gần như tất cả các ngành định lượng. Ví dụ, trong vật lý, đạo hàm của sự dịch chuyển của vật chuyển động theo thời gian là vận tốc của vật thể và đạo hàm của vận tốc đối với thời gian là gia tốc. Đạo hàm của động lượng của một cơ thể đối với thời gian bằng với lực tác dụng lên cơ thể; sắp xếp lại tuyên bố phái sinh này dẫn đến phương trình nổi tiếng F = ma liên quan đến định luật chuyển động thứ hai của Newton. Tốc độ phản ứng của một phản ứng hóa học là một đạo hàm. Trong nghiên cứu hoạt động, các công cụ phái sinh xác định các cách hiệu quả nhất để vận chuyển vật liệu và thiết kế nhà máy.
Các đạo hàm thường được sử dụng để tìm cực đại và cực tiểu của hàm. Các phương trình liên quan đến đạo hàm được gọi là phương trình vi phân và là cơ bản trong việc mô tả các hiện tượng tự nhiên. Các dẫn xuất và khái quát hóa của chúng xuất hiện trong nhiều lĩnh vực toán học, chẳng hạn như giải tích phức, giải tích hàm, hình học vi phân, lý thuyết đo lường và đại số trừu tượng.
Đạo hàm
[sửa | sửa mã nguồn] Bài chi tiết: Đạo hàm

Giả sử x và y là các số thực và y là hàm của x, nghĩa là với mỗi giá trị của x, có một giá trị tương ứng của y. Mối quan hệ này có thể được viết là y = f(x). Nếu f(x) là phương trình của đường thẳng (gọi là phương trình tuyến tính), thì có hai số thực m và b sao cho y = mx + b. Trong "hình thức chặn dốc" này, thuật ngữ m được gọi là độ dốc và có thể được xác định từ công thức:

trong đó ký hiệu Δ (dạng chữ hoa của chữ Hy Lạp delta) là tên viết tắt của "thay đổi". Theo sau đó Δy = m Δx.
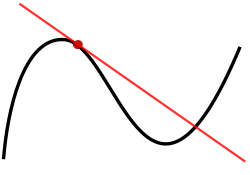
Nói chung hàm số không phải là một đường thẳng, vì vậy nó không có độ dốc. Về mặt hình học, đạo hàm của f tại điểm x = a là độ dốc của đường tiếp tuyến với hàm f tại điểm a (xem hình). Điều này thường được ký hiệu là f ′(a) trong ký hiệu Lagrange hoặc dy/dx|x = a trong ký hiệu của Leibniz. Do đạo hàm là độ dốc của xấp xỉ tuyến tính với f tại điểm a, nên đạo hàm (cùng với giá trị của f tại a) xác định xấp xỉ tuyến tính tốt nhất hoặc tuyến tính hóa của f gần điểm a.
Nếu mọi điểm a trong miền của f có đạo hàm, có một hàm gửi mọi điểm a đến đạo hàm của f tại a. Ví dụ: nếu f(x) = x2, thì hàm đạo hàm f ′(x) = dy/dx = 2x.
Một khái niệm liên quan chặt chẽ là sự khác biệt của một hàm. Khi x và y là các biến thực, đạo hàm của f tại x là độ dốc của đường tiếp tuyến với đồ thị của f tại x. Vì nguồn và đích của f là một chiều, nên đạo hàm của f là một số thực. Nếu x và y là vectơ, thì phép tính gần đúng tuyến tính tốt nhất với đồ thị của f phụ thuộc vào cách f thay đổi theo nhiều hướng cùng một lúc. Lấy xấp xỉ tuyến tính tốt nhất theo một hướng xác định đạo hàm riêng, thường được ký hiệu là ∂y/∂x. Việc tuyến tính hóa của f theo tất cả các hướng cùng một lúc được gọi là đạo hàm tổng.
Lịch sử vi phân
[sửa | sửa mã nguồn]Khái niệm về vi phân theo nghĩa của một đường tiếp tuyến là một khái niệm rất cũ, quen thuộc đối với các nhà nghiên cứu hình học Hy Lạp như Euclid (c. 300 TCN), Archimedes (c 287-212 TCN.) Và Apollonius của Pergaeus (c. 262 – 190 TCN).[3] Archimedes cũng giới thiệu việc sử dụng infinitesimals, mặc dù chúng chủ yếu được sử dụng để nghiên cứu diện tích và khối lượng hơn là các dẫn xuất và tiếp tuyến; xem sử dụng infinitesimals của Archimedes.
Việc sử dụng infinitesimals để nghiên cứu tốc độ thay đổi có thể được tìm thấy trong toán học Ấn Độ, có lẽ sớm nhất là vào năm 500 sau Công nguyên, khi nhà thiên văn học và nhà toán học Aryabhata (476-550) sử dụng infinitesimals để nghiên cứu quỹ đạo của Mặt trăng.[4] Việc sử dụng infinitesimals để tính toán tỷ lệ thay đổi đã được Bhāskara II (1114411185) phát triển đáng kể; thật vậy, người ta đã lập luận rằng [5] rằng nhiều khái niệm chính của phép tính vi phân có thể được tìm thấy trong công trình của ông, chẳng hạn như " Định lý Rolle ".[6]
Nhà toán học Ba Tư, Sharaf al-Dīn al-Tūsī (1135-1213), trong tác phẩm Chuyên luận về phương trình, đã thiết lập các điều kiện để một số phương trình bậc ba có các nghiệm, bằng cách tìm cực đại của đa thức bậc ba thích hợp. Ví dụ, ông đã chứng minh rằng tối đa của biểu thức bậc 3 a x2 — x3 xảy ra khi x = 2a/3 và kết luận rằng phương trình a x2 — x3 = c có chính xác một nghiệm dương khi c = 4 a3/27 và hai nghiệm dương khi 0 < c < 4 a3/27 [7] Nhà sử học khoa học, Roshdi Rashing,[8] đã lập luận rằng al-Tūsī phải sử dụng đạo hàm của hàm bậc 3 để có được kết quả này. Tuy nhiên, kết luận của Rash đã được tranh luận bởi các học giả khác, những người lập luận rằng ông ta có thể thu được kết quả bằng các phương pháp khác không yêu cầu đạo hàm của hàm.[7]
Sự phát triển hiện đại của tính toán thường được ghi nhận cho Isaac Newton (1643-1727) và Gottfried Wilhelm Leibniz (1646-1716), trong đó cả hai người có tiếp cận độc lập [9] và thống nhất về vi phân và đạo hàm. Tuy nhiên, cái nhìn sâu sắc quan trọng của hai người để được ghi công, là định lý cơ bản của giải tích liên quan đến vi phân và tích phân: điều này làm cho hầu hết các phương pháp trước đây dùng để tính toán diện tích và thể tích,[10] vốn không được mở rộng đáng kể kể từ thời Ibn al -Haytham (Alhazen), trở nên lỗi thời.[11] Đối với ý tưởng về đạo hàm, cả Newton và Leibniz đều xây dựng dựa trên công trình quan trọng trước đó của các nhà toán học như Pierre de Fermat (1607-1665), Isaac Barrow (1630-1677), René Descartes (1596-1650), Christiaan Huygens (1629), Blaise Pascal (1623-1662) và John Wallis (1616 sừng1703). Về ảnh hưởng của Fermat, Newton từng viết trong một bức thư rằng " Tôi đã có gợi ý về phương pháp này từ cách vẽ tiếp tuyến của Fermat, và bằng cách áp dụng nó vào các phương trình trừu tượng, trực tiếp và đảo ngược, tôi đã đưa nó thành tổng quát. " [12] Isaac Barrow thường được công nhận cho sự phát triển ban đầu của đạo hàm.[13] Tuy nhiên, Newton và Leibniz vẫn là những nhân vật quan trọng trong lịch sử của vi phân, không chỉ bởi vì Newton là người đầu tiên áp dụng vi phân vào vật lý lý thuyết, trong khi Leibniz đã phát triển một cách có hệ thống phần lớn các ký hiệu vi phân mà vẫn được sử dụng cho đến ngày nay.
Từ thế kỷ 17, nhiều nhà toán học đã đóng góp cho lý thuyết về vi phân. Vào thế kỷ XIX, giải tích đã được các nhà toán học như Augustin Louis Cauchy (1789 –1857), Bernhard Riemann (1826 –1866) và Karl Weierstrass (1815 – 1897). Cũng trong thời kỳ này, vi phân được khái quát hóa thành không gian Euclide và mặt phẳng phức.
Xem thêm
[sửa | sửa mã nguồn]- Dạng vi phân
- Tích phân
- Giới hạn
- Hàm số
- Đạo hàm
- Tích phân đường
- Tích phân mặt
Tham khảo
[sửa | sửa mã nguồn]- ^ "Definition of DIFFERENTIAL CALCULUS". www.merriam-webster.com (bằng tiếng Anh). Truy cập ngày 26 tháng 9 năm 2018.
- ^ ""Integral Calculus - Definition of Integral calculus by Merriam-Webster"". www.merriam-webster.com (bằng tiếng Anh). Truy cập ngày 1 tháng 5 năm 2018.
- ^ See Euclid's Elements, The Archimedes Palimpsest and O'Connor, John J.; Robertson, Edmund F., "Vi phân", Bộ lưu trữ lịch sử toán học MacTutor, Đại học St. Andrews
- ^ O'Connor, John J.; Robertson, Edmund F., "Vi phân", Bộ lưu trữ lịch sử toán học MacTutor, Đại học St. Andrews
- ^ Ian G. Pearce. Bhaskaracharya II. Lưu trữ ngày 1 tháng 9 năm 2016 tại Wayback Machine
- ^ Broadbent, T. A. A.; Kline, M. (tháng 10 năm 1968). "Reviewed work(s): The History of Ancient Indian Mathematics by C. N. Srinivasiengar". The Mathematical Gazette. Quyển 52 số 381. tr. 307–8. doi:10.2307/3614212. JSTOR 3614212Bản mẫu:Inconsistent citations{{Chú thích tạp chí}}: Quản lý CS1: postscript (liên kết)
- ^ a b JL Berggren (1990). "Đổi mới và truyền thống ở Muafat Sharaf al-Din al-Tusi", Tạp chí của Hiệp hội Đông phương Hoa Kỳ 110 (2), trang 304-309.
- ^ Trích dẫn bởi JL Berggren (1990). "Đổi mới và truyền thống ở Muafat Sharaf al-Din al-Tusi", Tạp chí của Hiệp hội Đông phương Hoa Kỳ 110 (2), trang 304-309.
- ^ Newton bắt đầu công việc của mình vào năm 1666 và Leibniz bắt đầu công việc của mình vào năm 1676. Tuy nhiên, Leibniz đã xuất bản bài báo đầu tiên vào năm 1684, trước khi xuất bản của Newton vào năm 1693. Có thể Leibniz đã thấy các bản nháp về tác phẩm của Newton vào năm 1673 hoặc 1676 Leibniz là công việc để tinh chỉnh của riêng mình. Cả Newton và Leibniz đều cho rằng người kia đạo văn các tác phẩm tương ứng của họ. Điều này dẫn đến một cuộc tranh cãi tính toán Newton Leibniz cay đắng giữa hai người đàn ông lần đầu tiên phát minh ra phép tính làm rung chuyển cộng đồng toán học vào đầu thế kỷ 18.
- ^ Đây là một thành tựu hoành tráng, mặc dù phiên bản giới hạn đã được chứng minh trước đó bởi James Gregory (1638 sừng1675), và một số ví dụ chính có thể được tìm thấy trong tác phẩm của Pierre de Fermat (1601 cách1665).
- ^ Victor J. Katz (1995), "Ý tưởng tính toán trong Hồi giáo và Ấn Độ", Tạp chí Toán học 68 (3): 163-174 [165-9 & 173-4]
- ^ Sabra, A I. (1981). Theories of Light: From Descartes to Newton. Cambridge University Press. tr. 144. ISBN 978-0521284363.
- ^ Yêu tinh, H. (1990).
Từ khóa » Dx Là Gì Trong đạo Hàm
-
Đạo Hàm Dy/Dx Là Gì ? Ứng Dụng Vi Phân Vào Phép Tính Gần ...
-
Dy/Dx Là Gì? Tìm Hiểu Về Công Thức Tổng Quát Tính ... - Beat Đầu Tư
-
Dx Là Gì - Dx Nghĩa Là Gì - Có Nghĩa Là Gì, Ý Nghĩa La Gi 2021
-
Tìm Dy/Dx Là Gì ? Ứng Dụng Vi Phân Vào Phép Tính Gần Đúng Tìm ...
-
Dy/dx Là Gì
-
Dx Là Gì - Chobball
-
Đạo Hàm – Wikipedia Tiếng Việt
-
Dy/Dx Là Gì? Tìm Hiểu Về Công Thức Tổng Quát Tính Toán đạo Hàm
-
[PDF] BÀI 2: ĐẠO HÀM VÀ VI PHÂN - Topica
-
Dy/Dx Là Gì? Tìm Hiểu Về Công Thức Tổng Quát Tính Toán đạo Hàm
-
Đạo Hàm Dy/ Dx Là Gì
-
Đạo Hàm Dy/Dx Là Gì ? Ứng Dụng Vi Phân Vào Phép Tính Gần ...
-
Sự Khác Biệt Giữa Vi Phân Và đạo Hàm - Sawakinome