Chẩn Đoán Cơ Bản - Tìm Hiểu Về Mạng CAN Trên Ô Tô - Phần 2
Có thể bạn quan tâm
Chẩn Đoán Cơ Bản - Tìm Hiểu Về Mạng CAN Trên Ô Tô - Phần 2
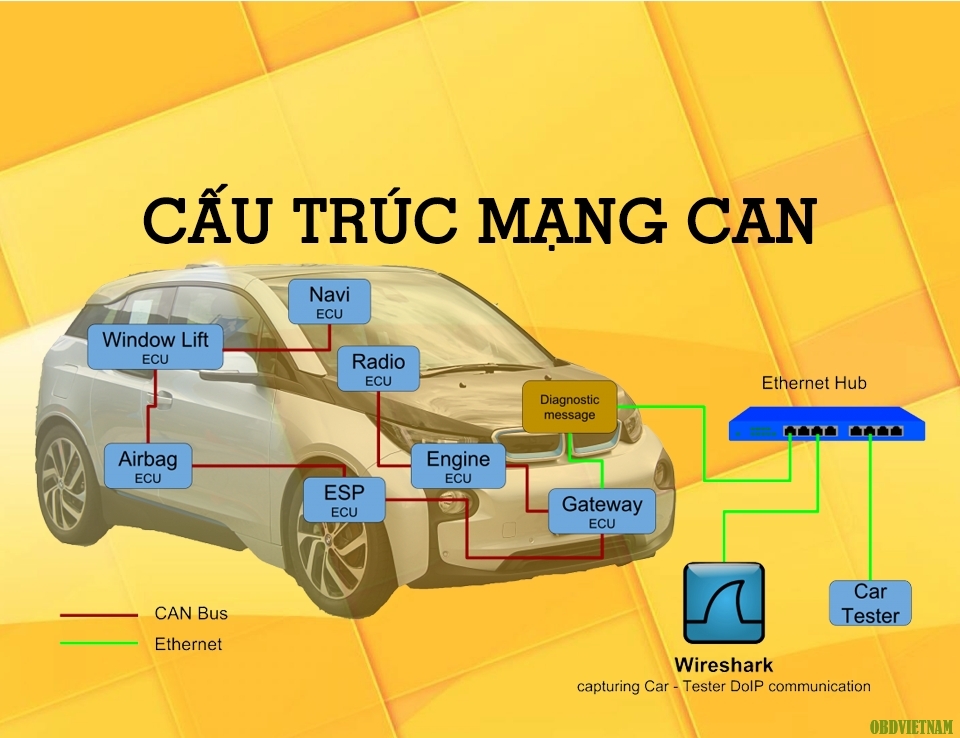
Tìm Hiểu Về Mạng CAN Trên Ô Tô - Phần 2 - Cấu Trúc Của Mạng CAN
CAN là một chuỗi mạng đa chủ thế để kết nối các đơn vị điều khiển điện tử [ECU] còn được gọi là các nút mạng. Hai hoặc nhiều nút mạng được yêu cầu trên mạng CAN để giao tiếp. Sự phức tạp của nút mạng có thể dao động từ một thiết bị I / O đơn giản đến một máy tính được nhúng với giao diện CAN và phần mềm phức tạp. Nút mạng này có thể là một cổng cho phép một máy tính chuẩn giao tiếp thông qua cổng USB hoặc Ethernet tới các thiết bị trên mạng CAN.
► BẢNG MÃ LỖI TRÊN XE GẮN MÁY
Tất cả các nút mạng được kết nối với nhau thông qua một mạng hai dây. Các dây là một cặp xoắn với một trở kháng đặc tính 120 Ω.
ISO 11898-2, còn được gọi là CAN tốc độ cao, sử dụng mạng tuyến tính kết thúc ở mỗi đầu với điện trở 120 Ω.
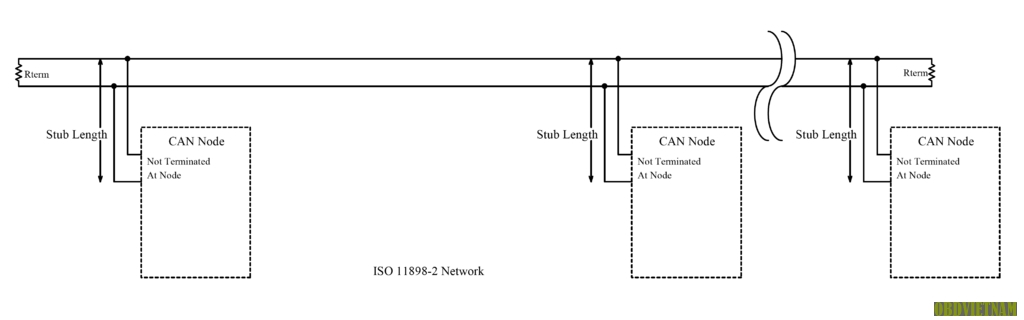 Mạng CAN tốc độ cao. ISO 11898-2
Mạng CAN tốc độ cao. ISO 11898-2
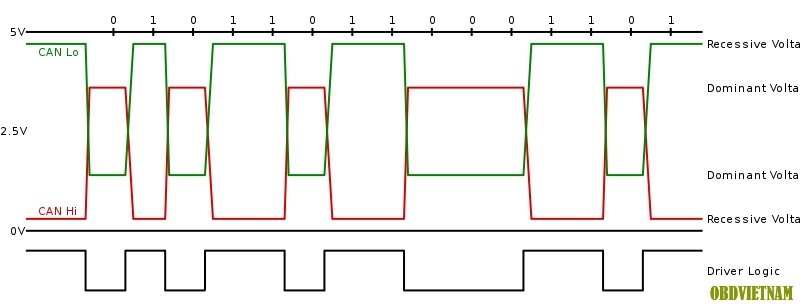
Tín hiệu CAN tốc độ cao điều khiển dây CAN cao tới 5 V và dây CAN thấp tới 0 V khi truyền một tín hiệu nổi - dominant (0), và không truyền khi đó là truyền tín hiệu lặn - recessive (1). Điện áp vi sai nổi có giá trị bằng 2 V. Điện trở cuối thụ động trả về hai dây đến một điện áp vi sai có giá trị bằng 0 V. Điện áp chế độ chung tín hiệu nổi phải nằm trong khoảng từ 1,5 đến 3,5 V và điện áp chế độ chung tín hiệu lặn phải nằm trong +/- 12 so với giá trị thông thường.
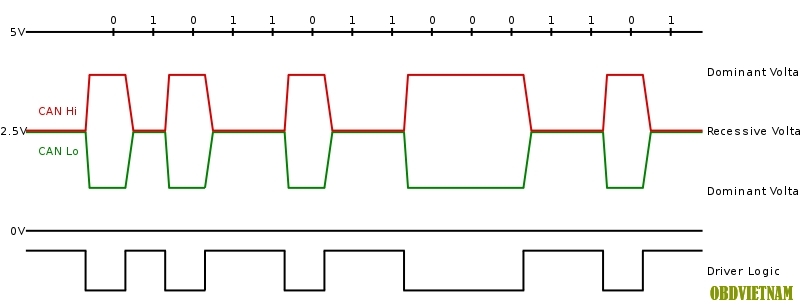 Tín hiệu truyền CAN tốc độ cao. ISO 11898-2
Tín hiệu truyền CAN tốc độ cao. ISO 11898-2
ISO 11898-3, được gọi là CAN có tốc độ thấp hoặc nhận diện lỗi CAN, sử dụng mạng tuyến tính, mạng sao hoặc mạng nhiều sao kết nối với mạng tuyến tính và được kết thúc tại mỗi nút mạng bằng một phần của điện trở kết thúc tổng thể. Điện trở giới hạn có giá trị khoảng 100 Ω, nhưng không nhỏ hơn 100 Ω.
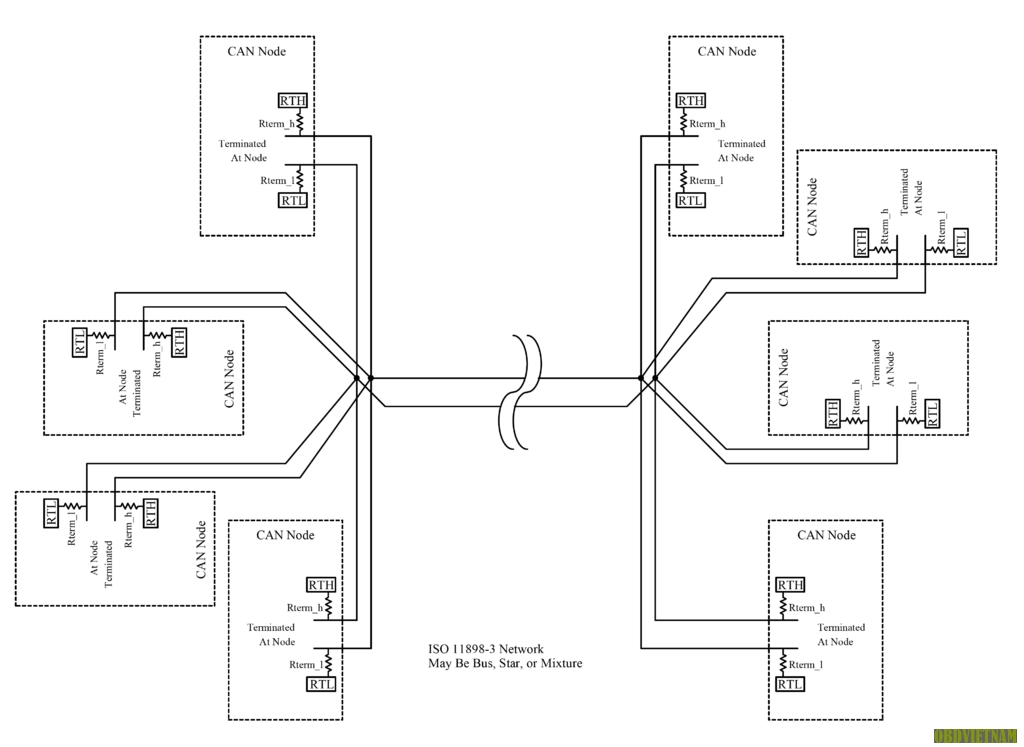 Mạng CAN nhận diện lỗi tốc độ thấp. ISO 11898-3
Mạng CAN nhận diện lỗi tốc độ thấp. ISO 11898-3
Tốc độ thấp / Tín hiệu nhận diện lỗi mạng CAN có thể truyền tín hiệu điện CAN cao tới 5 V và dây CAN thấp tới 0 V khi truyền một tín hiệu nổi - dominant (0), và không truyền khi đó là truyền tín hiệu lặn - recessive (1). Điện áp vi sai nổi phải lớn hơn 2,3 V (với 5 V Vcc) và điện áp vi sai lặn phải nhỏ hơn 0,6 V. Các điện trở kết thúc thụ động trả lại CAN điện áp thấp tới RTH trong đó RTH tối thiểu là 4,7 V (Vcc - 0,3 V trong đó Vcc có giá trị 5 V) và CAN điệp áp cao tới RTL, trong đó RTL tối đa là 0,3 V. Cả hai dây phải có khả năng xử lý từ -27 đến 40 V mà không bị hư hại.
 Tín hiệu truyền CAN tốc độ thấp. ISO 11898-3
Tín hiệu truyền CAN tốc độ thấp. ISO 11898-3
Với cả CAN tốc độ cao và CAN tốc độ thấp, tốc độ của quá trình chuyển đổi sẽ nhanh hơn khi quá trình chuyển tiếp tín hiệu nổi xảy ra vì các dây CAN đang được điều khiển tích cực. Tốc độ của tín hiệu nổi để chuyển tiếp tín hiệu lặn, phụ thuộc chủ yếu vào chiều dài của mạng CAN và điện dung của dây được sử dụng.
CAN tốc độ cao thường được sử dụng trong các ứng dụng ô tô và công nghiệp, nơi xe mạng chạy từ đầu này đến đầu khác. Khả năng chịu lỗi CAN thường được sử dụng khi các nhóm nút mạng cần được kết nối với nhau.
Các thông số kỹ thuật ISO yêu cầu mạng phải được giữ trong một điện áp mạng chế độ chung tối thiểu và tối đa, nhưng không xác định cách giữ mạng trong phạm vi này.
Mạng CAN phải được giới hạn. Các điện trở giới hạn là cần thiết để ngăn chặn phản xạ cũng như trở lại mạng về trạng thái lặn hoặc không hoạt động của nó.
Tốc độ cao CAN sử dụng điện trở 120 Ω ở mỗi đầu của một tuyến tính. CAN tốc độ thấp sử dụng điện trở ở mỗi nút mạng. Các loại giới hạn khác có thể được sử dụng như Mạng Giới Hạn Sự Chệch được xác định trong ISO11783.
Một Mạng Giới Hạn Sự Chệch cung cấp nguồn và Mass ngoài CAN tín hiệu trên cáp bốn dây. Điều này cung cấp tự động điện và sự kết thúc ở mỗi đầu của mỗi đoạn mạng. Một mạng ISO11783 được thiết kế cho các giắc cắm và loại bỏ các đoạn mạng và ECU.
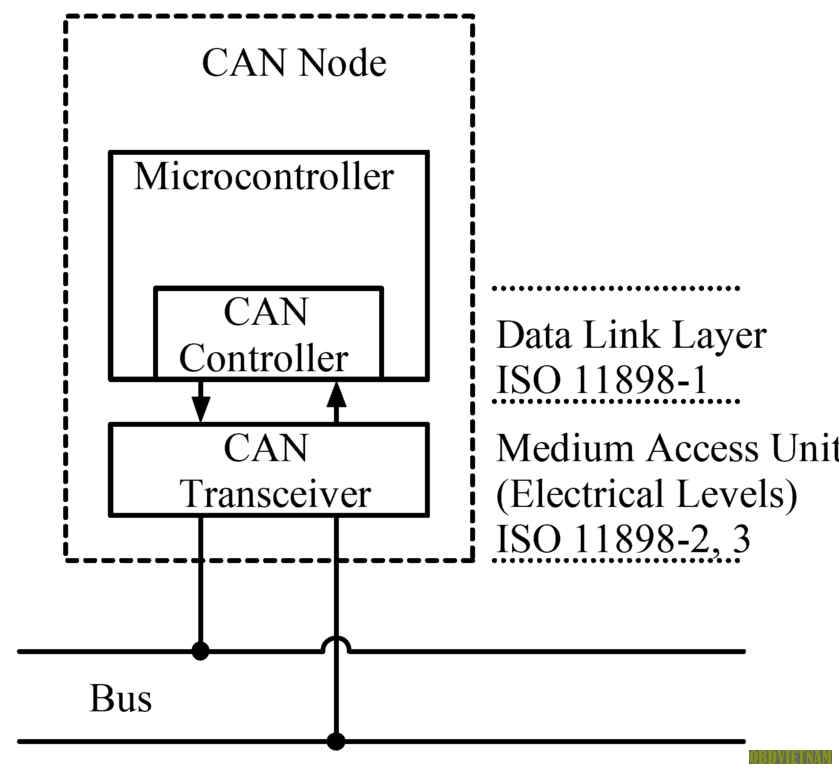 Nút mạng CAN
Nút mạng CAN
Mỗi nút mạng yêu cầu:
- Bộ xử lý trung tâm, bộ vi xử lý hoặc bộ xử lý máy chủ. • Bộ xử lý máy chủ quyết định những gì các tín hiệu nhận được có nghĩa là gì và những thông điệp nào nó muốn truyền tải. • Cảm biến, bộ truyền động và thiết bị điều khiển có thể được kết nối với bộ xử lý máy chủ. - Bộ điều khiển CAN; thường là một phần không thể thiếu của vi điều khiển • Nhận: Bộ điều khiển CAN lưu trữ các bit nối tiếp nhận được từ mạng cho đến khi toàn bộ thông báo có sẵn, sau đó có thể được tìm nạp bởi bộ xử lý máy chủ (thường là do bộ điều khiển CAN kích hoạt ngắt). • Gửi: Bộ vi xử lý máy chủ gửi (các) tín hiệu truyền đến bộ điều khiển CAN, truyền các bit này lên trên mạng khi mạng được độc lập. - Bộ thu phát được xác định theo tiêu chuẩn ISO 11898-2 / 3 đơn vị truy cập trung bình [Medium Access Unit - MAU] • Nhận: Bộ thu phát chuyển đổi luồng dữ liệu từ mức CANbus đến mức mà bộ điều khiển CAN sử dụng. Nó thường có mạch bảo vệ để bảo vệ bộ điều khiển CAN. • Truyền: Bộ thu phát chuyển đổi luồng dữ liệu từ bộ điều khiển CAN sang mức CANbus.
Mỗi nút mạng có thể gửi và nhận tín hiệu, nhưng không thể đồng thời. Một tín hiệu hoặc cấu trúc bao gồm các mã ID (số nhận dạng), đại diện cho mức độ ưu tiên của thông báo và có tối đa 8 byte dữ liệu. CRC, thừa nhận vị trí [ACK] và các tín hiệu khác cũng là một phần của thông báo. CAN FD được cải tiến mở rộng chiều dài của phần dữ liệu lên đến 64 byte trên mỗi khung hình. Tin nhắn được truyền tuần tự lên mạng bằng cách sử dụng định dạng không quay về không (No Return to Zero - NRZ) và có thể nhận được bởi tất cả các nút mạng.
Các thiết bị được kết nối bởi mạng CAN thường là các cảm biến, bộ truyền động và các thiết bị điều khiển khác. Các thiết bị này được kết nối với mạng thông qua bộ xử lý máy chủ, bộ điều khiển CAN và bộ thu phát CAN.
Xem lại phần trước:
- Chẩn Đoán Cơ Bản - Tìm Hiểu Về Mạng CAN Trên Ô Tô - Phần 1
- Chẩn Đoán Cơ Bản - Cổng Kết Nối Liên Kết Dữ Liệu Trên Ô Tô
- Chẩn Đoán Cơ Bản - Các mã PID Không Tiêu Chuẩn và Định Dạng Mạng CAN
- Chẩn Đoán Cơ Bản - Các Kiểu Đánh Số Mã PID
► TIÊNG ANH CHUYÊN NGÀNH Ô TÔ QUA HÌNH ẢNH (PHẦN 16) - HỆ THỐNG XỬ LÍ KHÍ THẢI
Kết nối với chúng tôi để theo dõi những tin tức mới nhất.
- Website: Công ty Cổ phần OBD Việt Nam
- Fanpage: Máy Chẩn Đoán Ô Tô Việt Nam
- Facebook Group: Kỹ thuật ô tô Việt Nam
- Youtube: OBD Việt Nam - Máy Chẩn Đoán Ô Tô
Mọi chi tiết xin liên hệ : Hotline: 0913 92 75 79
Tin liên quan
- Muốn Trở Thành Chuyên Gia Chẩn Đoán? Hãy Bắt Đầu Từ Tài Liệu Ô Tô
- Cách Tiếp Cận Tài Liệu Ô Tô Châu Âu Cho Thợ Việt
- Đọc Tài Liệu Ô Tô Mazda - Mitsubishi - Ford Sao Cho Không Nhầm Pan
- So Sánh Tài Liệu Ô Tô Toyota – Honda – Hyundai – Kia Từ Góc Nhìn Kỹ Thuật
- Cách Đọc Tài Liệu Hộp Số Tự Động Đúng Tư Duy Chẩn Đoán
- Khi Nào Thực Sự Cần Tra Tài Liệu Sơ Đồ Cân Cam?
- Cách Đọc Tài Liệu Động Cơ Ô Tô Để Khoanh Vùng Pan Nhanh
- Vì Sao Xe Đời Mới Bắt Buộc Phải Có Tài Liệu Điện Ô Tô?
- Đọc Sai Sơ Đồ Mạch Điện Ô Tô – Nguyên Nhân Khiến Thợ Sửa Sai Pan
- App Tra Cứu Tài Liệu Ô Tô Thay Đổi Cách Làm Nghề Của Thợ Như Thế Nào?
Từ khóa » Cách đo Kiểm Mạng Can
-
Chẩn đoán Hư Hỏng Mạng (CAN) Giao Tiếp Trên Xe ô Tô - CarTek
-
Hướng Dẫn Kiểm Tra Và đo Kiểm Mạng CAN ô Tô Trên Các Dòng Xe ...
-
Hướng Dẫn đo Kiểm Mạng CAN Phần 2 - Học điện ô Tô - YouTube
-
Cùng VATC Tìm Hiểu Cách Kiểm Tra Mạng CAN Trên Camry 2007 P1
-
Hướng Dẫn Kiểm Tra Mạng CAN Trên Xe Camry 2007 - Phần 1 - VATC
-
Mạng Giao Tiếp CAN Trên ô Tô Và 5 điều Quan Trọng Cần Phải Biết
-
Chẩn đoán Hư Hỏng Mạng (CAN) Giao Tiếp Trên Xe ô Tô | OTO-HUI
-
Hỏi/Đáp Kỹ Thuật Cách Sửa Chữa Lỗi Mạng CAN - Otosaigon
-
Chẩn Đoán Cơ Bản - Tìm Hiểu Về Mạng CAN Trên Ô Tô - Phần 5
-
Tìm Hiểu CAN Bus – Giới Thiệu Cơ Bản Mạng CAN Bus Trên Xe - XecoV
-
Mạng CAN - Học điện Ôtô
-
Giới Thiệu Mạng Giao Tiếp CAN
-
CAN Bus Là Gì? Sự Khác Biệt Với Các Bus Còn Lại Trên ô Tô
-
Mạng Giao Tiếp CANBUS - Trang Tin Tức, Công Nghệ Và Kỹ Thuật Ô ...