Những Cơ Cấu Cơ Học Thường Được Sử Dụng Trong Thiết Kế Cơ ...
Có thể bạn quan tâm
Cùng tìm hiểu xem cơ cấu cơ học gồm những loại nào? Chúng hoạt động ra làm sao? Ưu nhược điểm của mỗi loại thế nào?

XTmechanical Blog xin chào các bạn.
Hôm nay, chúng tôi xin tạm gác lại bài toán gắp- thả vật mà chúng tôi đã đăng tải tuần trước. Bài viết này, Chúng ta sẽ cùng đi tìm hiểu về những cơ cấu cơ học khác nhau thường được sử dụng trong ngành thiết kế cơ khí và hệ thống tự động hóa. Chúng ta thường gặp cơ cấu sử dụng mô tơ làm nguồn truyền động, có dạng biến đổi động lực từ chuyển động quay của mô tơ sang chuyển động thẳng như băng tải, có dạng như bàn xoay (index table chuyển động quay thuần túy), dạng truyền động đồng bộ (truyền chuyển động bằng hệ bánh răng). Nếu phân tích hết tất cả các dạng thì sẽ mất khá nhiều thời gian, bài viết lần này sẽ đi phân tích một số trường hợp thường gặp nhất trong thiết kế. Nào chúng ta cùng bắt đầu thôi.
Phân loại cơ cấu cơ khí.
Vì mỗi dạng cơ cấu lại có các ưu- nhược điểm khác nhau và dựa trên nguồn truyền động và cơ chế chuyển đổi chúng ta sẽ phân loại chúng thành các dạng theo bảng sau đây.
| Nguồn truyền động | No. | Hoạt động | Cơ cấu chuyển đổi chuyển động | Ví dụ ứng dụng |
| Nguồn truyền động quay (motor) | 1 | Chuyển động thẳng | Cơ cấu Vít me | Cơ cấu chấp hành một trục |
| Băng tải | ||||
| Cơ cấu thanh răng(rack and pinion) | ||||
| 2 | Chuyển động gián đoạn | Cơ cấu CAM | Hệ thống bàn xoay | |
| Cơ cấu geneva (hay còn gọi là cơ cấu Malte/Man) | ||||
| 3 | Chuyển động khứ hồi | Cơ cấu CAM cơ học | Động cơ servo Cần gạt nước oto Bàn nâng | |
| Cơ cấu CAM điện tử | ||||
| Cơ cấu Link | ||||
| Cơ cấu ren (dạng trượt, vít me) | ||||
| 4 | Chuyển động đồng bộ | Cơ cấu trục dẫn thẳng (line shaft) | ||
| 5 | Chuyển động dạng đòn bẩy | Cơ cấu ròng rọc | Cần cẩu, cần trục | |
| 6 | Chuyển động quay duy trì | Cơ cấu bánh đà | Động cơ, máy khâu, đồ chơi | |
| Nguồn truyền động tịnh tiến | 7 | Chuyển động quay | Tay quay con trượt | Động cơ đốt trong Cơ cấu chấp hành dạng bàn xoay |
| Cơ cấu thanh răng(rack and pinion) |
1. Cơ cấu biến đổi chuyển động quay thành chuyển động thẳng.
Các cơ cấu biến đổi chuyển động quay thành chuyển động thẳng được sử dụng rộng rãi trong thiết kế cơ khí, hệ thống tự động hóa, một trong số đó không thể không nhắc đến cơ cấu chấp hành một trục. Nguồn phát truyền động thường được sử dụng là động cơ servo hay động cơ bước, từ động cơ quay biến đổi thành chuyển động thẳng. Những cơ cấu có thể kể đến là cơ cấu vít me, băng tải, thanh răng… được ứng dụng rất đa dạng trong các hệ thống máy. Hãy cùng xem xét ưu-nhược điểm của các cơ cấu trên bằng bảng dưới đây.
| Cơ cấu biến đổi chuyển động | Ưu điểm | Nhược điểm |
| Vít me | Định vị vị trí chính xác Có khẳng năng tăng tốc và làm việc ở tốc độ cao | Quãng di chuyển ngắn và bị giới hạn Tiếng ồn phát ra khi làm việc khá lớn Chi phí cao |
| Băng tải | Tốc độ chuyển động cao Quãng di chuyển dài Chi phí thấp Tiếng ồn nhỏ Chi phí bôi trơn, bảo dưỡng thấp | Độ chính xác trong định vị vi trí: thấp Không thích hợp để tăng tốc nhanh (do tính co giãn của dây đai băng tải) |
| Cơ cấu thanh răng | Tốc độ chuyển động cao Quãng di chuyển dài Có khẳng năng tăng tốc và làm việc ở tốc độ cao | Chi phí bôi trơn, bảo dưỡng cao Tiếng ồn phát ra khi làm việc khá lớn Phát sinh mài mòn khi hoạt động |
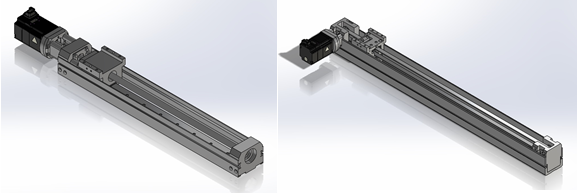
Hình ảnh: Cơ cấu chấp hành một trục
Trên đây là danh sách sơ bộ.
Hình trên mô tả bộ truyền động với cơ cấu bên trái sử dụng vít me và cơ cấu bên phải sử dụng dây đai. Khi thiết kế tùy thuộc vào yêu cầu mà chúng ta lựa chọn dạng truyền động, cũng cần hết sức lưu ý đến hướng lắp đặt của động cơ.
Gần đầy nhiều cơ cấu chấp hành sử dụng động cơ servo tuyến tính. Servo tuyến tính có ưu điểm là tính chính xác cao, tiếng ồn nhỏ, và khả năng tăng tốc nhanh, nhưng nhược điểm của chúng là giá thành cao và thời gian đặt hàng có thể bị ảnh hưởng bởi việc thiếu nguồn cung linh kiện sản xuất từ đất hiếm trên thị trường.
Khi xem xét ba loại cơ cấu được liệt kê trong bảng ở trên chúng ta có thể đưa ra kết luận rằng tốt hơn hết là bạn nên chọn vít me nếu bạn cần độ chính xác, băng tải nếu bán muốn chi phí giảm xuống, nếu cần một cơ cấu đáp ứng hành trình di chuyển dài thì thanh răng hoặc băng tải là lựa chọn tối ưu.
2. Cơ cấu biến đổi chuyển động quay thành chuyển động gián đoạn.
Những cơ cấu này được sử dụng phổ biến trong các hệ thống máy làm việc theo chu kì, hay có chu trình sản xuất lặp đi lặp lại với chức năng tạo ra chuyển động gián đoạn. Nổi bật trong đó phải kể đến cơ cấu CAM và cơ cấu Cơ cấu geneva (hay còn gọi là cơ cấu Malte/Man)
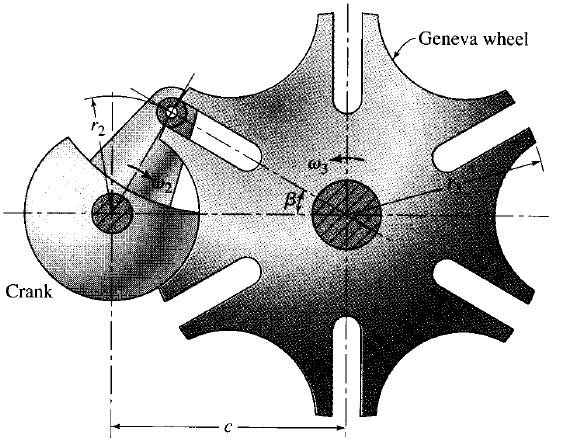
Hình ảnh: cơ cấu geneva (hay còn gọi là cơ cấu Malte/Man)
Chắc hẳn các bạn đã quen thuộc với cơ cấu CAM, một cơ cấu rất phổ biến trong thiết kế máy tự động. Biên dạng (hình dạng) của CAM cho phép chuyển động trơn tru và xác định được góc chia. Khi chuyển động diễn ra, trục đầu ra của cơ cấu sẽ dừng trong một khoản thời gian nhất định ngay cả khi động cơ vẫn đang quay, đó là lí do người ta gọi cơ cấu CAM là cơ cấu chuyển động gián đoạn.
Geneva có hình dạng đơn giản hơn CAM, cũng giống như CAM hình dáng của geneva quyết định chuyển động không liên tục của nó. Dù không có cấu hình phức tạp như CAM nhưng cơ cấu geneva là một cơ cấu thuận tiện khi bạn muốn thực hiện một hệ thống ngắt quãng với chi phí dễ chịu.
| Cơ cấu | Ưu điểm | Nhược điểm |
| CAM | Chuyển động cơ cấu CAM rất trơn tru, nhẹ nhàng. | Cơ cấu cam có biên dạng phức tạp vì vậy mà giá thành gia công cao |
| Geneva (hay còn gọi là cơ cấu Malte/Man) | Biên dạng đơn giản hơn vì thế mà giá thành cũng thấp hơn | Cơ cấu này không thể thực hiện chuyển động trơn tru như cơ cấu CAM |
Ngoài những ưu nhược điểm kể trên, các bạn cũng cần lưu ý rằng những thiết bị sử dụng cơ cấu CAM, một khi đã được quyết định thì các thông số kỹ thuật như tỷ lệ tăng / giảm tốc độ không thể thay đổi sau này. Vì vậy, khi thiết kế cần phải tính toán cẩn thận theo các thông số kỹ thuật của thiết bị. Tuy nhiên, như đã nói ở trên, cấu tạo cơ cấu đơn giản nên ít xảy ra hỏng hóc. Hơn thế nữa, do là một dạng cơ cấu không phản ứng sốc, mạnh , vì vậy nó cũng có thể được sử dụng cho các thiết bị có gắn động cơ servo.
3. Biến đổi hướng, phạm vi của chuyển động thẳng hoặc chuyển động quay.
Link (Thanh liên kết)
Cơ cấu link (thanh liên kết) là một dạng cơ cấu được sử dụng để biến đổi hướng, phạm vi của chuyển động. Các thanh liên kết được sử dụng ở nhiều nơi khác nhau. Điển hình như biến đổi chuyển động quay thành chuyển động tịnh tiến (gạt nước), ổn định chuyển động (bàn nâng), hay chuyển đổi lực và hành trình (kích chữ A) ... Khi học lý thuyết các thanh liên kết được trình bày và diễn giải dưới dạng vector và những công thức toán học phức tạp. Còn trong thiết kế chung thì điều chúng ta cần quan tâm nhất là “nó chuyển động ra làm sao?” và “lực tác động thế nào?” như vậy là đủ.
| Cơ cấu biến đổi | Ưu điểm | Nhược điểm |
| Cơ cấu CAM cơ học | Những hình dạng CAM phức tạp cho phép thực hiện những động tác trơn tru mà mượt mà | Một khi hình dạng CAM được quyết định, cách duy nhất để thay đổi cơ cấu là làm lại CAM mới, việc này làm tăng chi phí và thời gian |
| Cơ cấu CAM điện tử | Chức năng giống như một CAM cơ học nhưng có thể được lập trình và thay đổi tùy ý theo yêu cầu | Vì là một mô hình CAM ảo nên cần thời gian lập trình thiết lập và sửa lỗi. Cần nhân lực có kinh nghiệm cao |
| Cơ cấu Link (thanh liên kết) | Hoạt động có thể được chuyển đổi dễ dàng, và vì cơ cấu link được cấu tạo bởi các bộ phận đơn giản nên dễ dàng thay đổi. | Không thể hoạt động mượt mà như cơ cấu CAM |
| Cơ cấu ren (vít me…) | Cơ cấu ren khá phổ biến trên thị trường nên luôn có sẵn với giá cả phải chăng | Trong hầu hết các trường hợp cần bảo dưỡng (tra dầu mỡ) liên tục. Ngoài ra cần lưu ý dầu mỡ có thể bị văng ra khi hoạt động |
Như trong hình dưới đây, cần gạt nước của ô tô được thiết kế để cánh tay đòn chuyển động qua lại khi động cơ quay. Link ở phía mô tơ gạt nước ngắn hơn link ở phía tay gạt nước, do đó chuyển động quay được chuyển thành chuyển động tịnh tiến.
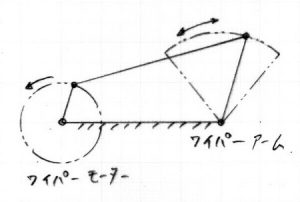

Hình ảnh: cần gạt nước trên xe ô tô
Một ví dụ khác là kích chữ A dùng khi thay lốp ô tô được thiết kế sao cho phần hình thoi của kích sẽ không bị biến dạng khi vặn vít, xe sẽ được nâng lên với giá trị được tính theo công thức f = FtanƟ.

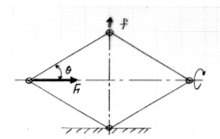
Hình ảnh: Kích chữ A
Bàn đạp chuyển số của xe máy nhìn chung giống như hình dưới đây. Khi bạn thực hiện thao tác dùng chân nhấn vào bộ phận hình chữ L ①, thanh liên kết số ② chuyển động qua lại và khớp nối ③ được kết nối. Trục của khớp nối ③ được nối với bên trong hộp số, và như thế bánh răng được thay đổi tạo thành quá trình chuyển số.
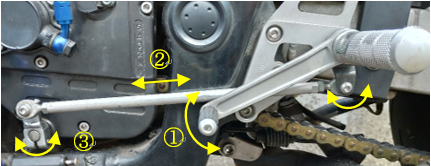
Hình ảnh: cần số xe máy
Vì các thành phần của cơ chế liên kết rất đơn giản, nên có thể tạo ra mô hình đơn giản bằng bìa cứng, vv… để có thể hình dung dễ dàng, và nếu bạn sử dụng các phần mềm 3D-CAD, bạn có thể thiết kế các liên kết phức tạp và phân tích trạng thái hoạt động và ứng suất tác động lên mỗi thành phần.
-
Cơ cấu CAM
Có hai dạng CAM thường được sử dụng là CAM khối và CAM rãnh, nhưng cam khối thường phổ biến hơn. Vật dụng quen thuộc sử dụng cơ cấu CAM như bộ truyền động của van nạp-xả ô tô (cam khối) và trong một vài cơ cấu cơ khí (cam rãnh) đã đề cập ở trên.
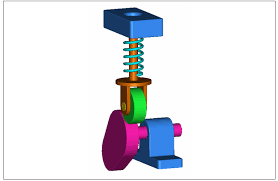
Hình ảnh: Cơ cấu CAM cơ học
Đối với Cơ cấu CAM cơ học Đũa đẩy được ép bởi một lò xo để nó chạy theo rãnh cam (hay biên dạng), nhưng khi tốc độ quay của trục CAM tăng lên, tốc độ giãn và co của lò xo không theo kịp, khi đó đũa đẩy không chạy theo rãnh cam. (trạng thái quá tải). Hãy ghi nhớ điều này khi sử dụng cơ cấu CAM.
CAM thường được sử dụng trong các thiết bị có chuyển động cố định và liên tục. Tuy nhiên gần đây, trong sản xuất đòi hỏi yêu cầu thay đổi linh hoạt nên CAM cơ khí ít được sử dụng. Thay vào đó, động cơ servo ngày càng trở nên phổ biến hơn. Bằng cách sử dụng một chức năng gọi là "CAM điện tử" trong hệ thống điều khiển của động cơ servo, hầu như có thể tạo ra một trục cam trong chương trình điều khiển giống như một cam cơ khí. Điều này được sử dụng làm trục chính và phần tương ứng với trục phụ được sử dụng làm trục phụ để hoạt động (trục phụ cũng là một động cơ servo). Ưu điểm là trục cam hầu như có mặt trong chương trình điều khiển nên có thể dễ dàng thay đổi hình dạng của đỉnh cam. Điều này giúp bạn có thể ứng phó một cách linh hoạt với những thay đổi của sản phẩm. Mặc dù giá thành cao, nhưng bù lại CAM điện tử lại là thiết bị rất linh hoạt.
4. Cơ cấu đồng bộ hóa chuyển động quay
Người ta sử dụng một trục dẫn dài dẫn truyền động năng của một động cơ duy nhất đến các băng tải hay cơ cấu khác. Trong những năm gần đây, hiệu suất của động cơ đã được cải thiện và giá thành rẻ hơn, vì vậy cơ hội nhìn thấy chúng đã ít đi, nhưng đó là một cơ cấu thường thấy trong quá khứ. Nó vẫn có thể được nhìn thấy trên một số băng tải.
Cấu tạo hệ truyền động trục dẫn gồm một động cơ, và đối với băng tải nhỏ, nó được dẫn động bằng dây đai tròn, còn đối với băng tải lớn, nó được dẫn động qua hệ bánh răng côn hoặc loại tương tự. Đối với hệ nhiều băng tải ghép lại, các trục dẫn được nối với nhau bằng khớp nối vì vậy mà có thể kéo dài khoảng cách. Bằng cách này, một động cơ có thể dẫn động tất cả các băng tải.
Ưu điểm của cơ cấu trục dẫn là chỉ cần một động cơ, giúp đơn giản hóa việc điều khiển (việc bảo dưỡng dễ dàng). Có ít thiết bị điều khiển (khả năng hỏng hóc rất ít). Tuy nhiên, hầu như không có sự linh hoạt, chẳng hạn như sau này muốn sửa đổi thiết bị thì sẽ gặp nhiều trở ngại. Trước đây, máy đóng hộp thường kết hợp trục dẫn với cam để tự động thực hiện căn chỉnh, xử lý, đóng hộp và thanh toán.
5. Biến đổi chuyển động thẳng thành chuyển động quay
Cơ cấu tay quay con trượt và cơ cấu thanh răng & bánh răng là những cơ cấu biến chuyển động thẳng thành chuyển động quay. Chúng có thể chuyển đổi dạng chuyển động trên đường thẳng thành chuyển động quay và ngược lại.
Cơ cấu tay quay con trượt điển hình là Piston của động cơ đốt trong, thanh kết nối và trục khuỷu. Piston chuyển động đi xuống do sự nổ của hỗn hợp nhiên liệu không khí. Chuyển động được truyền tới trục khuỷu qua thanh truyền và chuyển thành chuyển động quay. Bằng cách lặp lại quá trình trên, động cơ sẽ quay. Trong máy ép, bánh răng sẽ quay và thanh răng sẽ di chuyển tịnh tiến, và đầu ép được hạ xuống để ép gia công.
Cơ cấu thanh răng & bánh răng giúp biến chuyển động thẳng thành chuyển động quay với thành phần chính là thanh răng và bánh răng. Loại cực lớn của cơ cấu thanh răng & bánh rắng được sử dụng cho cơ chế chuyển giai đoạn. Ưu điểm của việc thực hiện chuyển động quay với cơ cấu thanh răng & bánh răng là có thể tăng mômen quay. Bằng cách kết hợp hai thanh răng với một bánh răng, có thể tăng mômen quay và giảm ứng suất uốn của trục quay.
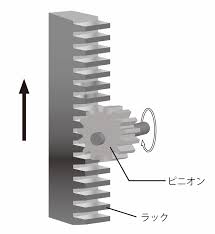
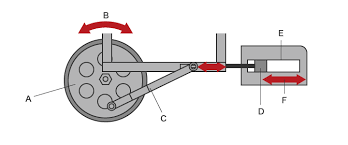
Hình ảnh: Cơ cấu thanh răng (trái) và cơ cấu tay quay con trượt (phải)
Trên thực tế ngoài những cơ cấu kể trên không thể không nhắc tới những cơ cấu cũng rất phổ biến và mang tính ứng dụng cao như cơ cấu ròng rọc, cơ cấu bánh đà, cơ cấu bánh răng hành tinh…Có rất nhiều cơ cấu quen thuộc với chúng ta, vì vậy nếu bạn quan sát và suy nghĩ về chúng một cách thường xuyên, bạn có thể sử dụng chúng khi thiết kế một hệ thống máy hay một thứ gì đó. Ứng dụng thành thạo các cơ cấu và làm cho chúng trở nên đơn giản sẽ giảm được giá thành, giảm nguy cơ hỏng hóc. Mỗi cơ chế đều có những đặc điểm khác nhau như ưu nhược điểm và có rất nhiều điều về máy móc không được viết trong sách giáo khoa nên chúng ta cần trau dồi kiến thức mỗi ngày.
Trên đây là bài viết về những cơ cấu cơ học khác nhau thường được sử dụng trong thiết kế cơ khí và hệ thống tự động hóa. Mọi ý kiến đóng góp xin để lại ở phần comment bên dưới. Cảm ơn các bạn đã ghé thăm blog của chúng tôi
Tác giả bài viết
Nguyễn Văn Hòa
Thao khảo tại: 機械機構について考えてみよう - 種類と仕組み | meviy | ミスミ (misumi-ec.com)
Từ khóa » Cơ Cấu Xoay Là Gì
-
Từ điển Việt Anh "cơ Cấu Quay" - Là Gì?
-
"cơ Cấu Quay" Tiếng Anh Là Gì? - EnglishTestStore
-
CƠ CẤU QUAY Tiếng Anh Là Gì - Trong Tiếng Anh Dịch - Tr-ex
-
[PDF] BÀI GiẢNG - Vanlang
-
Có Thể Bạn Chưa Biết - Cơ Cấu Lên Cót đồng Hồ Cơ Như Thế Nào?
-
Cơ Cấu Tay Quay Con Trượt Của Cơ Cấu
-
Động Cơ điện Xoay Chiều Là Gì? Nguyên Lý Và Cấu Tạo Motor Xoay Chiều
-
Cần Trục Quay Là Gì? Tìm Hiểu Về Thành Phần Cấu Tạo, Phân Loại Nó.
-
Nêu Cấu Tạo,nguyên Lý Làm Việc Và ứng Dụng Của Cơ Cấu Tay Quay
-
Cơ Cấu Man – Wikipedia Tiếng Việt
-
Động Cơ Wankel Là Gì? Cấu Tạo Và Nguyên Lý Hoạt động - VinFast
-
Cơ Cấu Tay Quay Thanh Lắc - Biến đổi Chuyển động
-
1700 Cơ Cấu Cơ Khí đã Mô Phỏng P3 - Tài Liệu Text - 123doc